如何使用DJI Mavic 3 行業版無人機加速事故取證
DJI 大疆行業應用
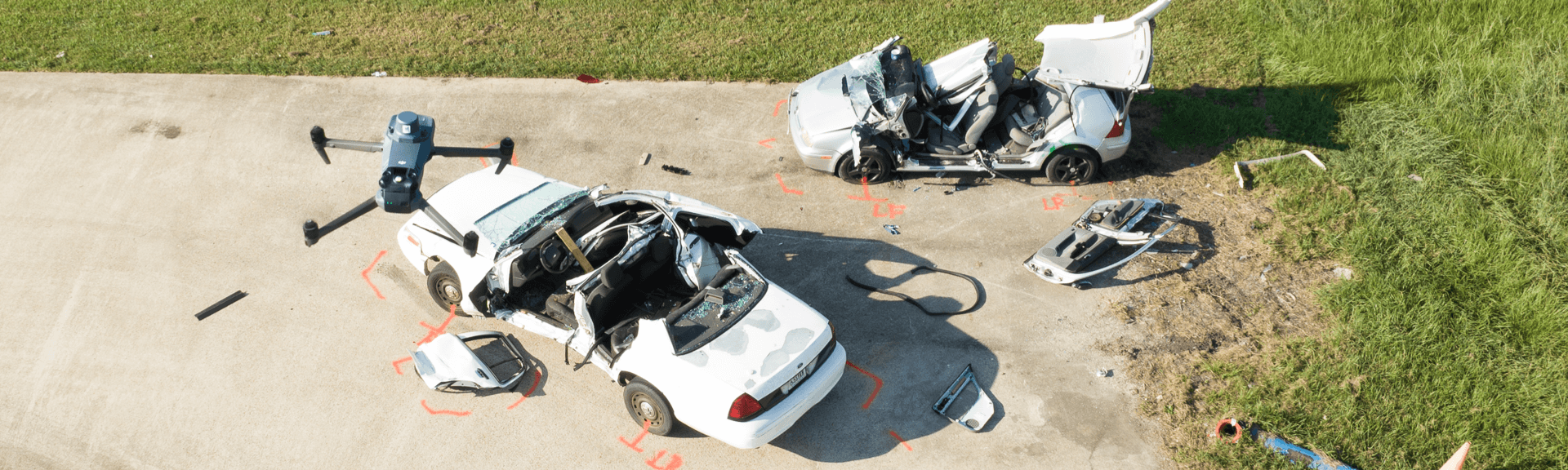
當發生交通事故時,公共安全人員通常需要記錄現場。這個關鍵步驟,也稱為事故重建,是準確度和速度之間的微妙平衡 – 道路持續受阻的每一秒都意味著交通更加繁忙,並且每個相關人員的安全風險都會增加。
無人機是幫助記錄場景和確保人員安全的可靠解決方案。使用 UAS 製圖只需要傳統或遺留場景文檔(例如全站儀)的一小部分時間,從而可以快速清理。真實場景以 3D 形式保存,具有詳細信息和厘米精度。
以下是工作流程的快速摘要以及本文深入探討的資源鏈接。總體而言,不同的團隊使用不同的方法,我們鼓勵與其他機構建立聯繫以找到最適合您的方法。
收集數據
1. 啟用正確的相機設置和 RTK(參見指南)。
2.在約 75-125 英尺處在 DJI Pilot 2 中 計劃自動測繪或傾斜任務。
3. 如果需要,在約 25 英尺和約 50 英尺的位置圍繞場景飛行一圈,同時打開定時照片設置。
4. 如果在夜間飛行,請考慮運動模糊和相機設置。
處理數據
5.大疆智圖處理數據。
利用數據
6. 利用 2D 地圖和 3D 模型/點雲輸出。
收集數據
場景注意事項
在捕獲數據之前,重要的是要考慮模型的準確性是否是一個重要因素,或者它是否僅用於態勢感知。利用地面控制點並將無人機連接到RTK是提高準確性的途徑,而檢查點則提供了驗證準確性的途徑。可以使用測量級 GNSS RTK 流動站完成記錄 GCP/檢查點。
在沒有檢查點的情況下,可以通過使用場景中的測量值或查看 DJI Terra Quality 報告中的地理參考 RMSE 來估計相對精度。
在數據採集過程中,要考慮道具清洗和任何可能受到干擾的證據。
數據採集設置
Mavic 3 Enterprise 具有 0.7 秒的照片間隔、15m/s 的最大速度、機械快門和 4/3 英寸 CMOS 廣角攝像頭,是事故重建的絕佳硬件選擇。該系統還可以利用可連接的 RTK 模塊進行校正,允許使用幾個檢查點而不是許多地面控制點。DJI Pilot 2是一款免費的地面控制軟件,自動安裝在遙控器上,隨遙控器一起更新。
建議使用我們的Mavic 3 Enterprise Survey Guide中介紹的以下數據捕獲設置:
- 圖片格式:JPG
- 圖像比例:4:3
- 機械快門:開
- 去扭曲:關閉
- RTK:啟用(推薦)
自動數據採集
作為第一步,自動數據收集對於收集整個場景的重疊照片非常重要。在白天,這是通過 Pilot 2 應用程序的飛行路線部分通過選擇映射、選擇智能傾斜的映射或傾斜來完成的。
在規劃任務時,我們強烈建議將以下內容納入您的參數/設置。
任務規劃設置:
- 默認重疊率至少 70% 的旁向和 80% 的前後。如果拍攝對像沒有太大差異來幫助攝影測量軟件將照片拼接在一起,請考慮更高的重疊度。
- 使用 M3E 或 P1 運行測繪任務時,如果區域允許,請選擇智能傾斜選項。
- 對於較小的事故現場,一般而言,在最低安全高度飛行以清除所有障礙物是有利的,通常在 75-125 英尺之間的高度。隨著場景尺寸的擴大,我們必須評估飛行時間和分辨率,由於照片需要重疊,兩者之間存在反比關係。
手動數據採集
完成高級數據捕穫後,如果需要較低的地面採樣距離,則必須考慮在較低高度收集額外的場景照片。
例如,如果道路兩邊都有樹冠,並且最初的自動任務飛行是在離地高度 125 英尺的高度飛行,那麼在較低高度的手動飛行可以收集補充圖像。
完成手動數據捕獲最容易通過以下方式完成:
- 從更高級別的數據捕獲高度下降時拍照
- 調整無人機位置和攝像機俯仰角度,將車輛或感興趣的區域放在框架的中心。監控俯仰角,使天空和周圍的風景遠離照片。
- 開啟定時拍照設置(即每2秒一次)以在飛行時收集重疊的照片
- 在約 50-75 英尺處圍繞場景飛行一圈
- 再下降 25 英尺至約 25-50 英尺
- 在約 25-50 英尺處圍繞場景再飛一圈
- 停止定時拍照並降落無人機

夜間注意事項
由於無人機在數據收集期間以快速移動,因此上述過程在白天效果最佳。當轉移到夜間時,有不同的考慮因素。Mavic 3 Enterprise 使用更大的傳感器尺寸和機械快門,有助於在夜間捕獲數據。

M2EA(左)和 M3E(右)以 2.3 mph 的速度在 40 英尺 AGL 處執行測繪任務的比較照片
首先,飛行員在飛行安全方面需要非常小心,因為用於障礙物檢測的視覺系統將在弱光條件下停用。考慮讓目視觀察員在飛行過程中密切觀察飛機狀態。
接下來是適當地照亮場景。在場景周圍較高(約 8 英尺)的位置設置燈光並將它們向下傾斜會在主體周圍產生光暈。此時,操作員可以將無人機放在事故現場上方,以判斷燈光是否導致照片曝光過度。如果是這樣,請調整燈功率或將燈調亮。
如果您看不到圖像中的細節,它們將不會出現在地圖或模型中。總的來說,處理一些陰影比處理曝光過度的圖像更容易。
鑑於一個場景可能比您可以用可用燈光照亮的單個區域大,一種技術是將地面控制點放置在照明區域的邊緣,然後可以將其包含在多個數據捕獲中。


夜間自動任務:
在計劃夜間自動任務時,您需要將飛行速度顯著降低到盡可能低的值以避免模糊,並僅在燈光產生的“光暈”中計劃任務飛行。如果沒有障礙物,低至 40 英尺的飛行也是有利的。總的來說,這將是最直接的數據收集方法,但需要確保在數據收集後檢查照片,並在飛行過程中密切監控無人機。
夜間手動抓取數據:
為確保良好的圖像質量,您可能需要手動調整相機參數,而不是簡單地讓自動設置來完成工作。例如,如果場景的某些部分看起來過曝並且您無法移動燈光,您可以調整快門速度。
更長的曝光值將允許更多的光線照射進來。但是,根據有效載荷和所使用的光線,飛行員可能需要在拍攝照片時暫停以避免模糊。一般來說,即使在無人機移動時,將快門速度保持在 1/60 也有助於避免任何模糊。在手動數據捕獲過程中,Pilot 2 應用程序中的屏幕網格覆蓋可用作重疊參考。
一些機構使用的另一種選擇是在駕駛無人機時拍攝視頻,然後將幀作為圖像拉出。

處理數據
DJI Terra 中的圖像處理可以提供精確的 2D 地圖和 3D 模型來記錄場景。總體而言,這個過程相當簡單,如我們的入門指南和視頻中所述。
- 導入照片並選擇設置/輸出文件
- 當將 RTK 模塊附件(在我們的測量指南中有詳細說明)與 Mavic 3 Enterprise 一起使用時,元數據將自動考慮更正。如果使用 NTRIP 服務,在處理之前為圖像定義正確的坐標系很重要(即 NAD83 EPSG 4269)。
- 如果拍攝的區域太寬,導入照片後可以根據x/y GPS位置選擇某組照片進行處理,或者按照空三可以選擇場景的某個區域進行處理。
- 完整的空中三角測量
- 添加 GCP/檢查點
- 處理 2D 地圖和 3D 模型。
- 在 DJI Terra 中處理模型需要高性能的 Windows 計算機。
- 處理後,您可以檢查報告以查看檢查點的準確性並衡量您的規模約束。
我們鼓勵您通過DJI Terra 網頁底部提供的 1 個月試用版試用Terra 。
利用輸出
數據處理完成後,有不同的選項可以利用輸出。總的來說,這個過程允許調查人員、檢察官和陪審團成員在任何時間和任何地點重新訪問現場。
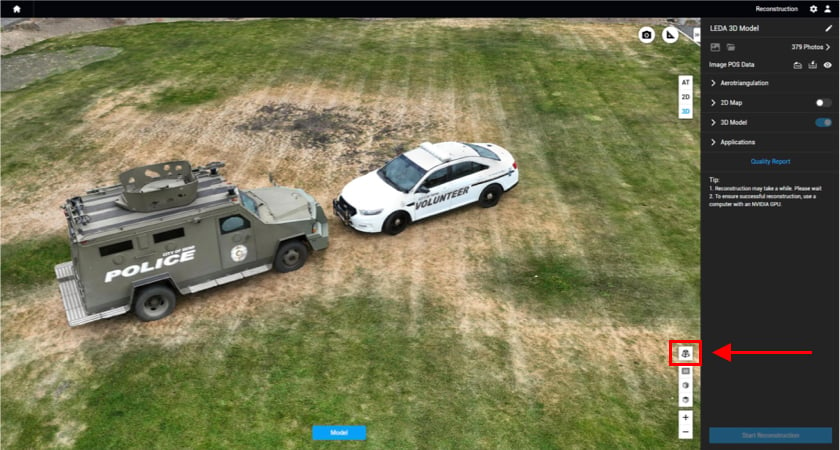
對於簡單的數據共享,可以將 2D 地圖或 3D 模型的屏幕截圖包含在 pdf 中。或者在下圖中突出顯示的 DJI Terra 中打開自動 360 度旋轉工具是集成到屏幕錄製中的有用工具。
文件本身也可以共享,包括圖像、GCP、2D 地圖和 3D 模型,這些文件可以在另一台安裝了 DJI Terra(免費查看)或其他 GIS 軟件的 Windows 計算機上查看。
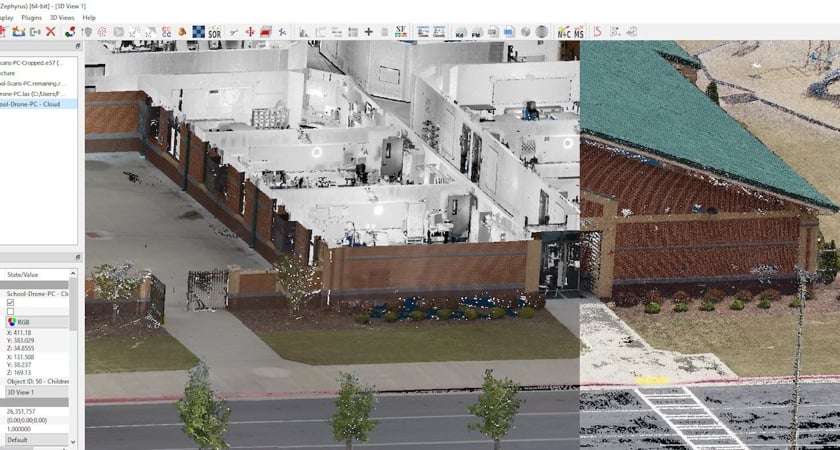
此外,將數據導入專用軟件可以確定子彈軌跡、定義視線或執行擠壓、動量和其他類型的法醫分析。點雲甚至可以使用 CloudCompare 等免費軟件與地面掃描儀數據合併。下圖顯示了包含和不包含無人機數據的示例。
謝謝
感謝 Aaron Beckman、Eric Gunderson 和 Brandon Karr 對在公共安全中使用 UAS 和本文所做的貢獻。

















