一束光的旅行–激光雷達基礎知識講解
UTC無人機應用技術培訓中心總部崔宇
光開啟了生命的篇章,也照亮了前行的道路。它與我們生活息息相關,也不斷地改革著生產方式。那我們今天就來講講一個關於光的故事。
1969年,人類把激光射向月球表面,測得了地月的準確距離。通過發射到接收的時間,乘以光速,所得距離再減半,這就是激光測距的基本工作原理。
通過這種方法可測量出物體與激光器之間的距離。再通過轉動激光發射的角度,可探測不同方向上的距離,以大疆Livox激光雷達為例,Livox安裝有兩個棱鏡,通過旋轉棱鏡使激光改變發射方向,射往不同點,從而獲得多點的距離信息。
如果要對一塊區域進行測量,又該如何?首先,需要激光雷達的移動數據,通過慣性導航設備(IMU)測量得到激光器的移動速度、偏航角和距離等信息。再將這些信息結合激光發射的速度、角度和時間信息,進行計算,最後就能得到這個區域內的點與激光器不同位置之間的距離,從而完成對這塊區域的測量。
由於激光雷達可測量的特性,其可應用於測繪行業。例如無人機測繪。通過與無人機的RTK系統相結合,對測量出每個點賦於位置信息,就可以對地表及其表面物體實現測繪工作。
例如,測量地面的海拔高度。我們從無人機RTK系統獲取飛行器的飛行高度(海拔高度),再減去激光雷達測量的飛行器到地面的距離,就可以計算出地面的海拔高度。
但是計算高度還需要考慮兩個因素,首先飛行器在空中並不穩定,需要飛行器上的飛控、RTK系統及激光雷達的慣導模塊數據相結合才能測量出準確信息;另外機載激光雷達會對地面進行掃描,其中有些脈衝是垂直於地面發射的,但大多是傾斜發射出去的,計算高度時還要考慮脈衝發射的角度。
總之,無人機在測量地面海拔高度時,激光雷達將激光發射向地面,然後通過發射到接收的時間,根據光速計算出距離,系統根據飛行器的高度、姿態及發射角度計算地面高度,再通過根據RTK系統得到地面物體的坐標。
測距時所採用的激光光源大都是近紅外波段,使用較多的波長是905nm和1550nm。DJI L1採用的Livox激光雷達波長為905nm,905nm相對於1550nm波長短,在大氣中光損小。
激光雷達發出的光能量有限,存在最遠的探測距離。探測距離在實際使用過程中受環境影響較大。主要影響因素有:目標物體表面反射率、形狀、環境光干擾等等。一般情況下廠家會標明在物體表面不同光照及反射率情況下激光雷達的測量距離。
DJI L1採用的激光雷達在0klx被測物體反射率為80%時量程為450米;在100klx被測物體反射率為10%量程為190米,在實際使用中可參考10%反射率下的探測距離。
點雲數據率又稱採樣頻率、脈衝頻率,是單位時間內激光器所能發射激光束的數量。相同條件下,頻率越高探測點的數目越多、作業效率越高。DJI L1激光雷達點雲數據率最高達240000點/秒。
視場角(FOV)表示激光束的掃描角,指激光束通過掃描裝置所能達到的最大角度範圍。DJI L1採用的Livox激光雷達重複掃描水平FOV為(70.4°×4.5°),非重複掃描水平FOV為(70.4°×77.2°)。
激光雷達測距值與真實值的差值,Livox AVIA 激光雷達距離精度為2cm。(測試條件為環境溫度25℃,目標物體距離20m,反射率80%)。
如同手電筒一樣,激光發出的光存在發散角,會產生光斑。例如激光雷達發散角為0.1*0.1°,在100m外光斑大小為17cm×17cm。
由於光斑的存在,激光雷達可收到多次回波,我們可以利用這一特性檢測物體邊緣。DJI L1支持多回波模式,最多支持三回波。在多個回波中,第一回波可獲取測量對象的高度信息;中間的回波通常對應物體的結構;而最後的回波則對應裸露的地表。在植被茂密的區域,通過多次回波就可以獲取樹木的數量、冠幅、樹高等信息。
被測目標物體表面反射率會影響激光雷達測量能力,影響物體表面反射率的因素主要有物體表面顏色和表麵類型(亞光、高亮、平滑、粗糙等),通常定義柯達白板(Kodak white material )表面反射率為100%。
表面粗糙的漫反射物體如水泥牆面,激光可能向任意方向反射,部分會返回激光雷達。
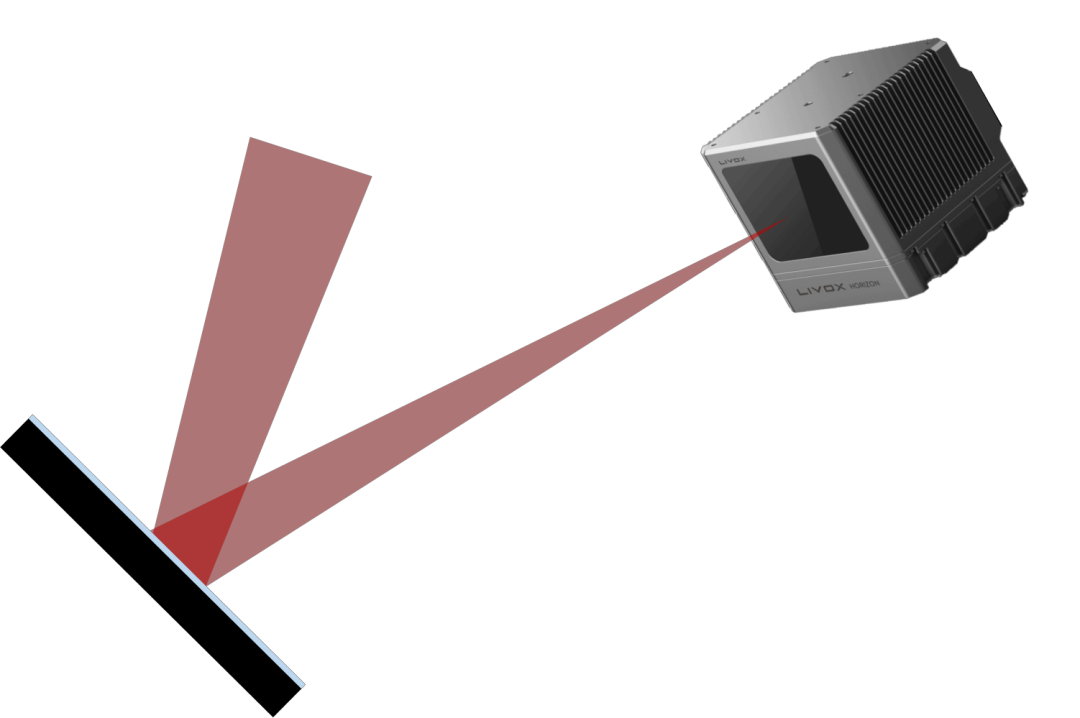
表面光滑的鏡反射物體如鏡子,如果激光束入射角較小,就會造成激光束的反射光束不能返回到接收器。在該點的測量值就會顯示為無物體,會造成數據丟失的情況。
目標物體表面形狀也會影響激光雷達測量距離和效果。當被測的平面物體大於光束直徑,此時激光雷達會收到單次回波。
當被測的平面物體小於光束直徑,此時激光雷達會收到多次回波(被測物體及背景反射),產生測量誤差。
光的旅行還未結束,請持續關注“UTC無人機培訓”再次踏上旅途。