UTC無人機培訓總部
新增相機信息菜單,可設置相機內參,提升第三方相機建模精度。
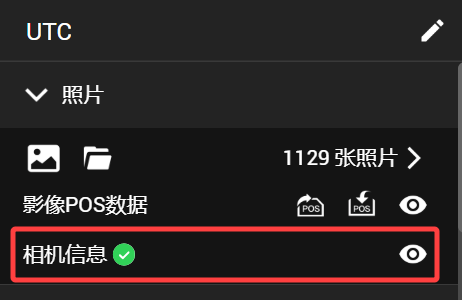
1、在導入照片數據後,大疆智圖會讀取照片文件夾中第一張照片的相機信息。點擊相機信息右側的查看按鈕,可在相機參數設置頁面查看/編輯相機信息。
相機信息
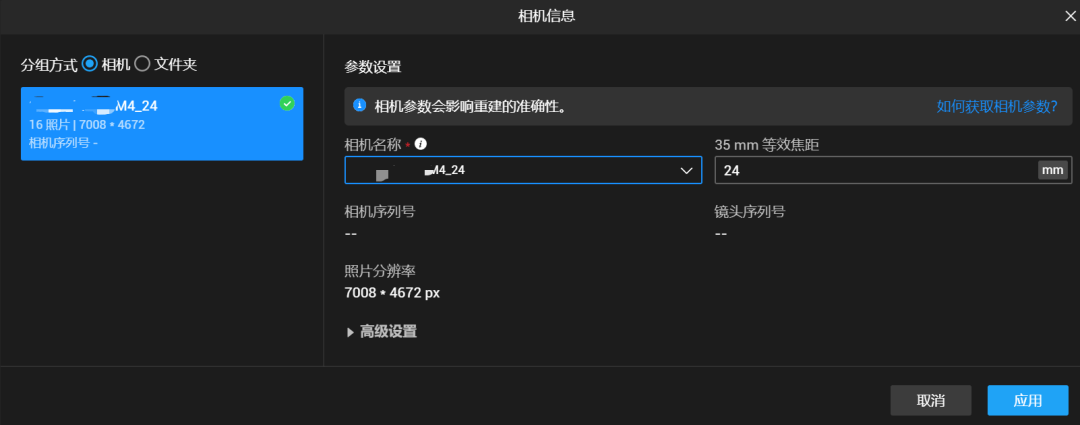
2、使用大疆以外品牌的相機/負載採集的數據,用戶可以在相機信息頁面中,根據從相機廠家獲取的數據,設置對應的相機名稱、35mm 等效焦距等信息。
相機信息頁面
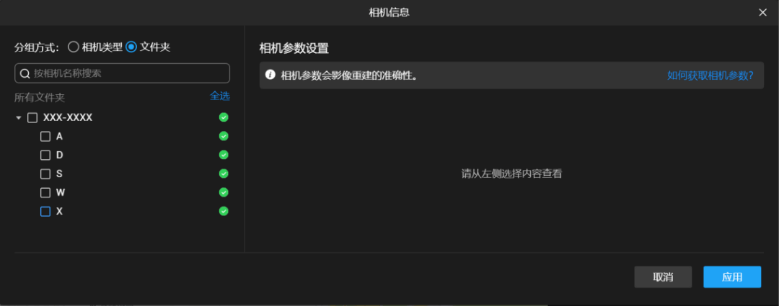
3、在使用多鏡頭相機時,需將不同相機拍攝的照片放在不同的文件中,再點擊文件夾按鈕,根據每個文件夾單獨設置相機信息。
多個文件夾分別設置內參的功能
4、可在高級設置中調整相機內參,解決因相機內參不准確導致建圖精度較差的問題。使用大疆以外品牌的相機,可根據從相機廠家獲取的相機內參數據進行填寫。
注意,不同廠家採用的畸變模型不同,參數需要根據不同模型進行調整。
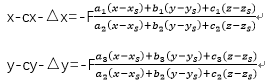
大疆智圖採用的畸變模型為:
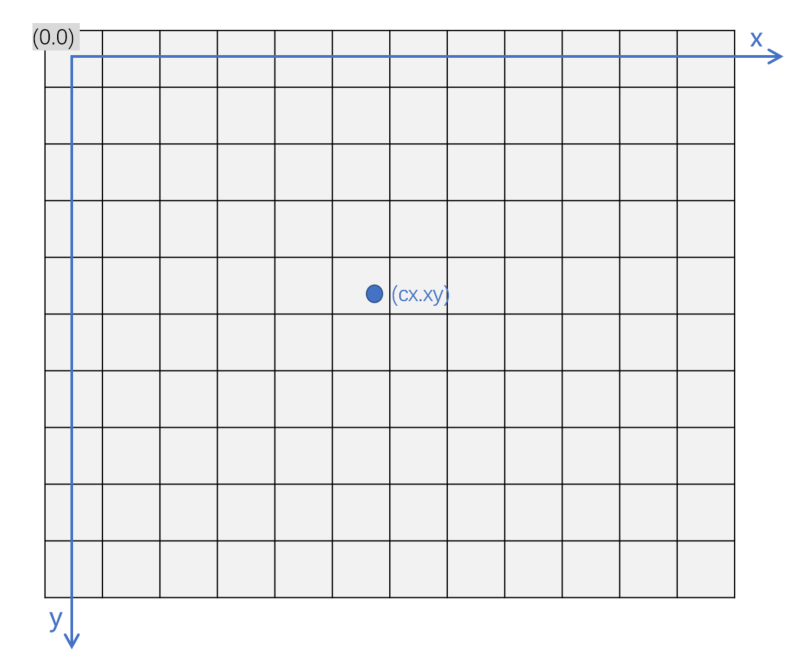
其中: △x,△y為像點改正值; x,y為像方坐標系下的像點坐標,坐標系如下圖所示; cx,cy為像主點,F為鏡頭的焦距。
由此,引入畸變差後的共線方程為:
像方坐標系
在固定相機參數菜單中,如果選擇固定相機內參,則該相機進行計算時,智圖不會再重新計算F、CX、CY 數據。該項適用於純正射數據(沒有高程優化)。如選擇固定全部,則智圖不會再重新計算相機信息,適用於已有最優解內參,如已通過高精度標定或已有任務計算得出過最優解內參的情況。
新增七參數轉換功能,可實現任意兩組坐標系之間的轉換。
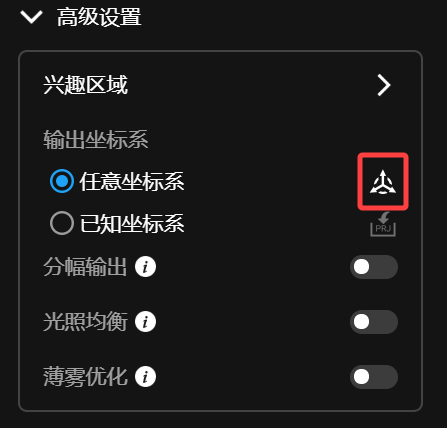
1、在使用大疆智圖進行二維重建或三維重建時,選擇任意坐標系選項的七參數轉換設置,可實現從WGS84、CGCS2000 等大地坐標係到地方投影坐標系的轉換。
七參數轉換設置
需要注意的是,大疆智圖僅支持由自身軟件計算出的七參數進行轉換,不支持輸入第三方的七參數。在計算七參數菜單中,計算七參數需要導入.txt和.csv格式的數據。數據信息和格式要求如下:
坐標點名:緯度(B、度格式)、經度(L、度格式)、高程(H)、東(x)、北(y)、高(z)
注意:txt文件使用逗號(,)製表符作為列分隔符,請確保至少3組坐標用於七參數計算。
數據示意
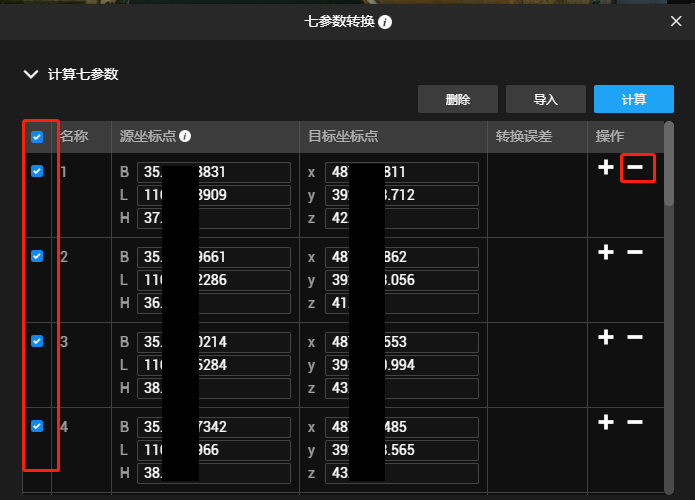
2、在導入數據後應進行檢查,B/L/H和x/y/z的數據是否正確對應緯/經/高以及東/北/高的順序。注意:x東坐標一般為6或8位,y北坐標一般為7位。同時表頭等無關信息,可通過操作菜單列中-進行刪除。
計算七參數
3、點擊計算功能後,可看到七參數計算結果以及轉換誤差。推薦轉換誤差小於預期成果精度的0.5倍(如要求成果精度為5cm,則建議轉換誤差小於0.025),可以得到較高精度轉換結果。如果誤差較大,可刪除轉換誤差較大的選項重新計算。確認轉換誤差達到要求後,點擊應用完成七參數計算並應用該七參數。
剔除粗差
4、若後續在同一區域進行數據處理,可直接點擊導出功能,將七參數以JSON格式進行保存。後續直接通過導入進行調取復用即可,無需重新計算。
注意:用於七參數計算的坐標數據,分佈原則類似地面控制點的原則。應均勻分佈在測區周圍,不要求一定在測區內,但是不可集中在測區局部小範圍內。否則得到的七參數即使得到很高的轉換誤差,但是在遠離計算數據的區域,實際上會產生較大偏移。
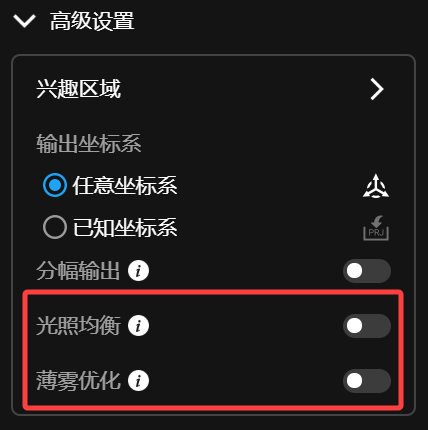
光照均衡和薄霧優化功能
新增光照均衡
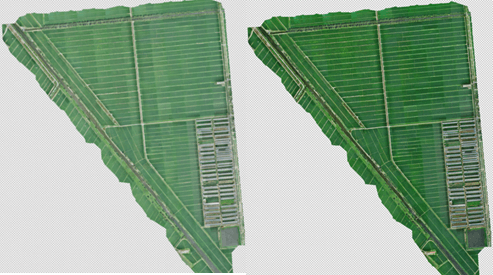
開啟光照均衡會對重建模型同時進行光照均衡和去霧處理,可改善在農田場景中,由於土地或作物冠層平滑,在強光照環境下會產生類似鏡面反射的效果,導致照片一邊亮一邊暗,重建成果出現“漸變“條紋的現象。
光照均衡優化對比(左優化前、右優化後)
新增薄霧優化
開啟薄霧優化僅去霧,不會進行光照均衡。
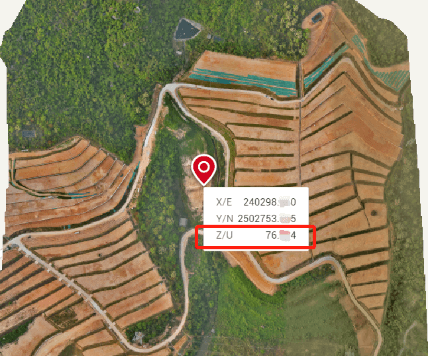
點測量增加高度信息
二維正射模型的點坐標測量增加高程測量,顯示的高程為DSM 的高程值。
高度信息
線測量新增坡度信息
線測量時,除了原有的水平距離、直線距離、垂直距離外,新增坡度信息。
坡度信息
二維地圖壓縮瓦片大小
大疆智圖優化了二維地圖瓦片大小,在不影響模型效果的情況下,文件大小比例壓縮至原本的三分之一。特別是在web 端的加載速度得到有效提升,有助於優化數據的交互處理和應用效果。
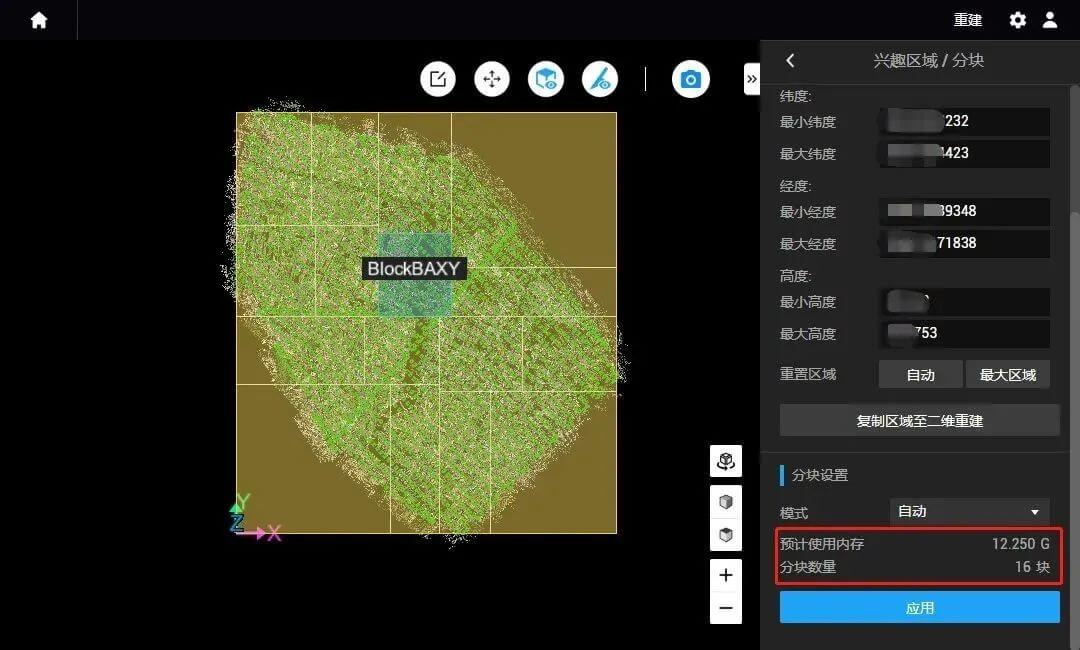
在三維重建中, 為保證效率,大疆智圖會根據電腦內存設置最大分塊。但有些場景(如導入第三方修模軟件)需要小的分塊,此時可以自定義設置分塊大小,大疆智圖新增以下分塊模式:
自動:獲取設備當前的可用內存,自動最大化分塊,並可顯示內存分塊信息。
自動分塊
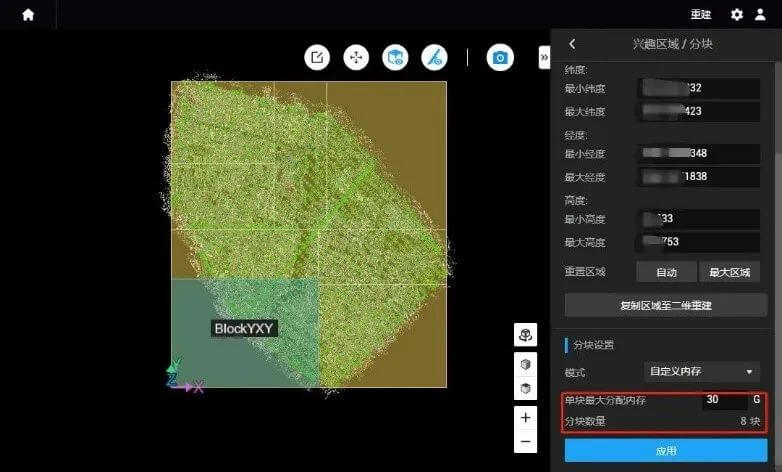
自定義內存:輸入單塊最大分配內存,軟件將依據輸入的內存值進行分塊。
自定義內存分塊
自定義邊長:根據用戶輸入的單塊邊長進行平面分塊,軟件界面會顯示當前距離下的分塊所需內存以及分塊數量。
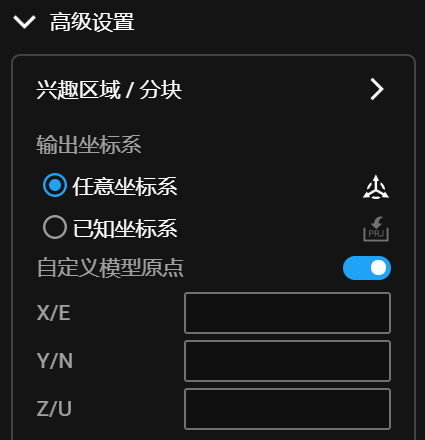
自定義分塊起始點:開啟後可自定義分塊原點的坐標系及坐標值,在模型更新的場景中,可以設置統一的分塊起始點,替換對應塊即可完成模型更新,該功能需要配合自定義模型原點功能一同使用,才能達到良好的分塊模型更新功能體驗。
當需要將多個任務成果,同時在模型平台上進行展示時,可將多個任務的模型原點設置為同一坐標,即可同步展示。以osgb格式為例,為了減少文件存儲大小,每個osgb文件中寫的都是基於模型原點的相對坐標。
自定義模型原點
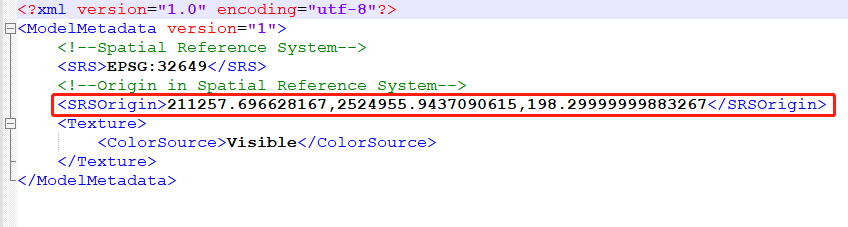
模型原點坐標係與輸出坐標系應保持一致,設置完成後開始重建。則OSGB、OBJ、PLY成果的模型原點將被設置成輸入點的坐標,原點位置會寫入metadata.xml文件中。
輸入點的坐標
此外,模型需要局部更新時,可將新的任務模型與原任務模型的原點設置為相同的點。更新的模塊會直接替換,實現模型局部更新。
三維重建時,大疆智圖會自動去除移動物體的貼圖,無需人工操作。
該優化機制生效的前提是,在採集照片時記錄到物體如車輛、人群進行了位移,才能被識別出來,進行去除優化。若車輛、人群等目標物體,在所有照片裡都停在同一個點,則不會被識別出來進行優化。
移動物體貼圖效果優化(左優化前、右優化後)
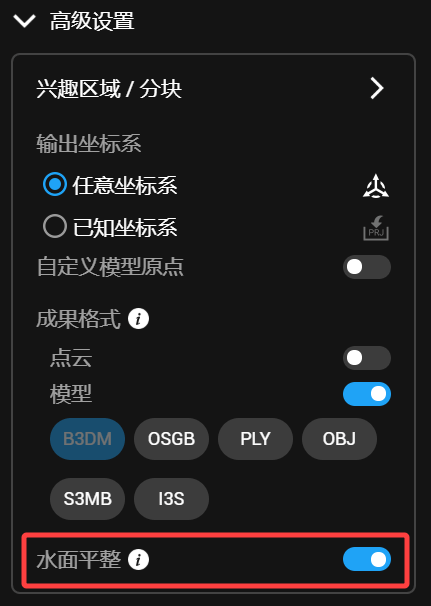
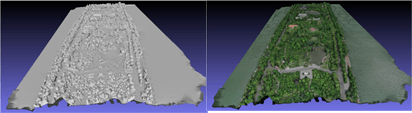
在進行三維重建時,測區內的水面區域往往會導致網型異常,為後期修模增加工作量。大疆智圖新增三維重建水面平整功能。
水面平整功能
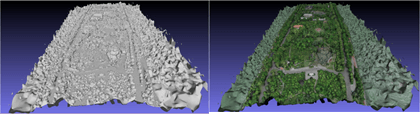
功能選項開啟後,能自動識別區域內的水面,進行平整,在倒影、漏識別、誤識別上有明顯改善,減少水面平整破洞情況,大幅提升模型美觀性,降低後期修模成本。
未啟用三維重建水面平整 啟用三維重建水面平整
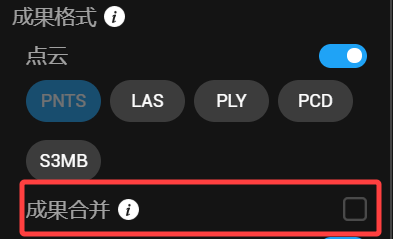
在進行DJI L1 點雲數據處理,或可見光三維重建生成“點云成果”時,可能因為原始數據存儲在多個文件夾或內存太小,導致成果拆分成多個點雲文件。
成果合併
大疆智圖新增“點云成果合併”功能,功能開啟後將多個點雲文件合併生成一個完整的點雲文件,此功能支持的點雲格式包括LAS、PLY、PCD 三種。
高程精度檢查
新增高程精度檢查
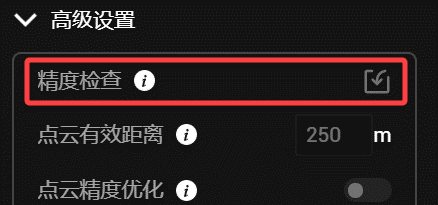
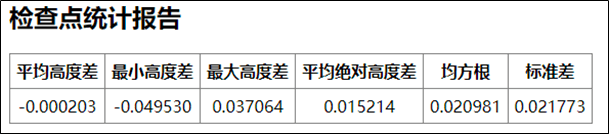
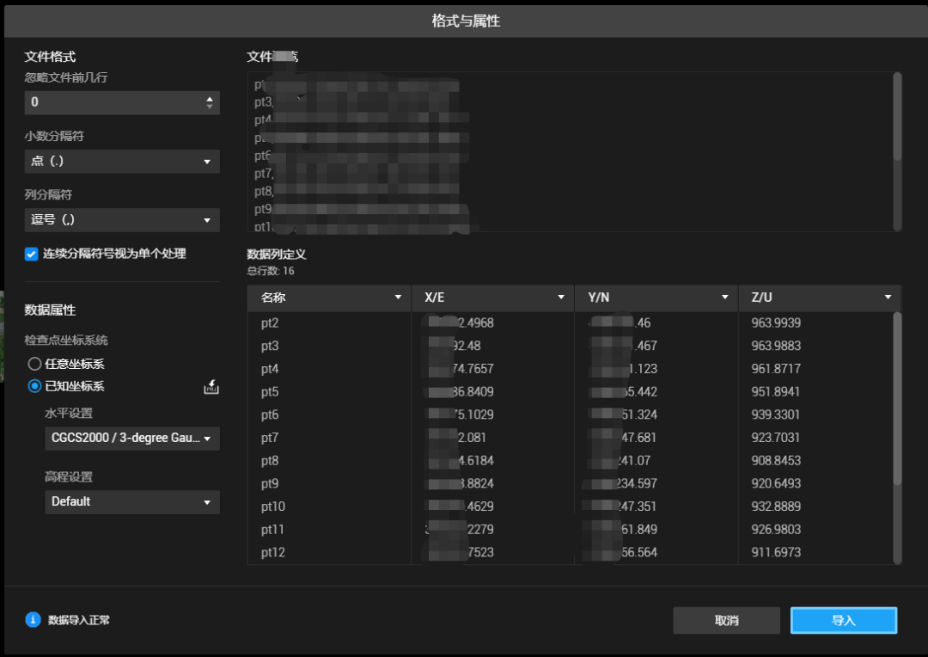
大疆智圖支持激光雷達點雲任務導入檢查點,進行高程精度檢查,在質量報告中自動生成高程差報告。該功能的原理是在檢查點周邊一定範圍內,將點雲進行內插,附和到檢查點的平面位置,並對比高程差。因此檢查點應部署在平坦表面,避開牆角等位置。
檢查點統計報告
在激光雷達點雲高級設置中的精度檢查菜單中,完成檢查點的導入,建模後即可在質量報告中獲取檢查結果。
導入檢查點的示意圖
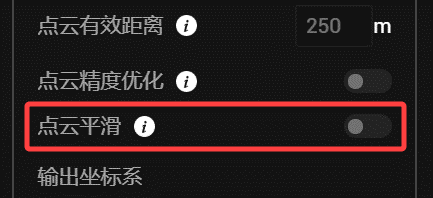
新增點雲平滑功能
無人機激光雷達進行數據採集時,時常出現點雲過厚的問題。特別是對硬質平面如平地、路面、山坡進行測量時,如激光雷達採集的點雲厚度過厚,地麵點提取效果較差,導致測繪精度不理想。
點雲平滑
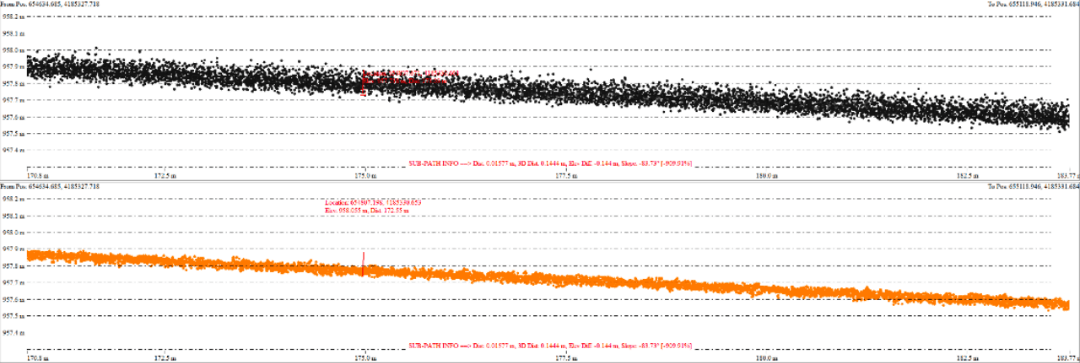
大疆智圖新增點雲平滑功能。開啟點雲平滑後,即可有效壓薄點雲,優化地麵點的提取效果,提升地物特徵的呈現和成果精度。
本效果圖中被測物為柏油馬路硬質地面 平滑前點雲厚度約為14.4cm 左右,平滑後降至5cm
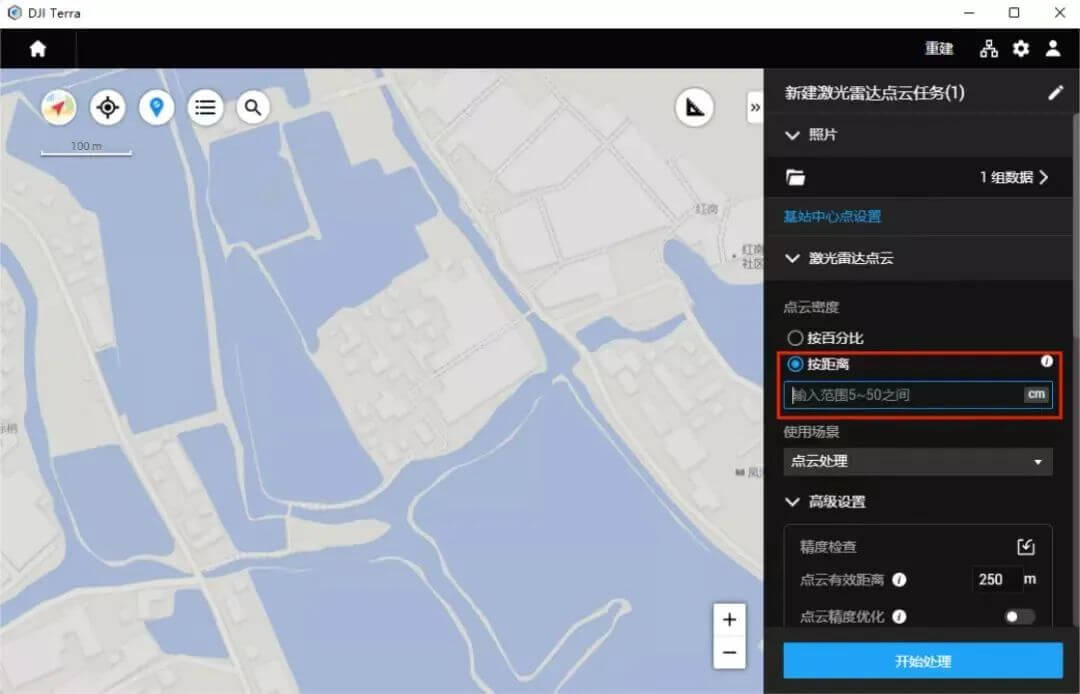
大疆智圖支持在點云密度項中設置以物理距離採樣,可在固定的距離範圍內,有效降低點雲的數量,使點云密度更加均勻。
點云密度按物理距離採樣功能入口
可設置5-50cm 的點雲採樣距離。需注意的是,如果距離過大則可能產生點雲稀疏的問題,建議根據項目實際需求設置採樣距離。
1、優化重建任務複製功能,支持複製重建參數及空三成果。
2、優化像控點文件導入功能,支持定義像控點文件格式。
3、激光雷達點雲處理默認的輸出坐標系修改為UTM 投影坐標系,根據基站中心點判斷投影帶。
4、優化OSGB、OBJ 和PLY 模型成果文件結構和文件名,適配更多後端軟件(如修模軟件)。
5、興趣區域界面的三維模型顯示由透視投影變為正交投影(平行投影)。
6、二維可見光重建(農田場景、果樹場景)及二維多光譜重建適配安培顯卡框架(RTX30 系列)。
7、三維模型分塊重建增加單塊重建失敗後重試兩次的機制(若重試兩次失敗則跳過),可提高重建成功率。
8、重建錯誤提示優化,一鍵導出日誌。
9、精細化巡檢航線新增適配機型。
10、支持單機重建設置「被攝物體距離」參數。
11、優化光照差異比較大的數據源在二維重建時成果的色彩一致性。
12、優化Windows 11( 64 位)操作系統的使用體驗。
13、優化實時重建的穩定性、重建精度及色彩一致性。
14、優化部分輸出坐標系下激光雷達點雲任務的重建速度。
2022 DJI Terra 大疆智圖更新功能大盤點
新增相機信息菜單

![]()
新增七參數轉換功能


二維可見光及多光譜重建功能更新
二維地圖坐標測量功能更新

三維重建自定義設置新增分塊模式
自定義模型原點
優化三維重建移動物體貼圖效果

優化三維重建水面平整功能
點云成果新增合併功能
激光雷達點雲數據處理功能更新
點云密度支持以物理距離採樣
其他項目更新





先創國際股份有限公司
專業代理經嚴格評鑑、篩選的世界知名一流品牌,並深耕各類型通路與網絡。近年來更積極拓展公部門、教育單位、及企業用戶,提出各項解決方案。專業形象和熱誠服務獲得市場普遍肯定。
統一編號:80282240
—
台北總公司/售後服務中心
114台北市內湖區瑞光路66巷25號1樓
Tel: (02)8792-8855 # 分機160~163
台中分公司
台中市西區公益路161號8樓之9 (I室)
Tel: (04)2302-1133
高雄分公司
高雄市三民區九如一路502號13樓B6
Tel: (07)390-0988
—
營業時間: 星期一~星期五 9:00~18:00 (不含國定例假日)。
客服信箱:service@esentra.com.tw
—


