自動巡檢中的無人機應用技術
UTC總部王忠源
南方電網自2015年大規模引入多旋翼無人機參與輸電線路運維工作以來,解決了傳統人工巡檢效率低、工作強度大等問題,但隨著時間推進,無人機手動飛行巡檢的一些諸如操作難度大、推進前期炸機率高等問題也逐漸顯現出來。
隨著電網機巡工作的成熟與多旋翼無人機技術的進步,輸電線路無人機“一鍵起飛、自動精細化巡檢”已經開始在南方電網部分地區試行,預計在2020年建立“數字南網”實現“機巡為主,人巡為輔”的目標,與手動飛行工作相比,自動飛行更為規範、巡檢質量更高,再次提升了作業效率,為運維人員有效減負。
現在就來詳細介紹一下無人機自動巡檢使用到的無人機機型與幾種技術。
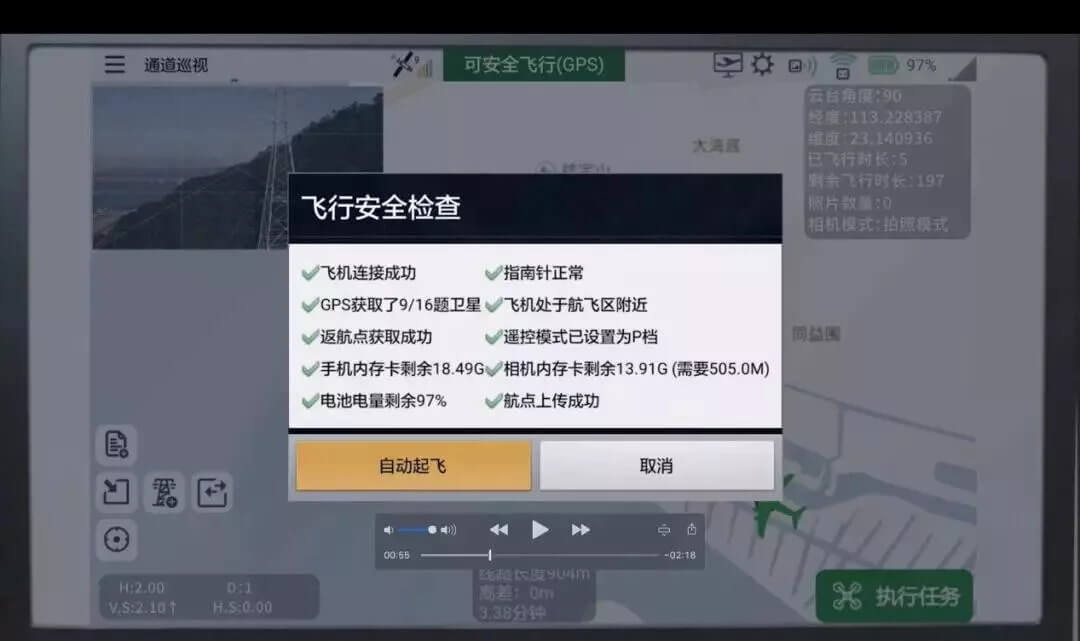
自動精細化巡檢圖傳畫面
自動巡檢使用的機型
精靈Phantom 4 RTK 和SDK 遙控器
精靈Phantom 4 RTK 集成全新RTK 模塊,擁有更強大的抗磁干擾能力與精准定位能力,提供實時厘米級定位數據,在執行自動巡檢任務時可保證航線精準、飛行安全。配合SDK遙控器使用廣東電網基於DJI MSDK開發的自動飛行軟件“智巡通”。工作人員只需在遙控器上選擇對應的模式,導入航線,即可實現桿塔“點對點”自動巡檢。

精靈Phantom 4 RTK 和SDK 遙控器
自動巡檢使用的技術
DJI M obile SDK開發:自動飛行軟件“智巡通”
“智巡通”提供正射影像、帶狀正射、傾斜攝影、線狀攝影、全景採集、通道巡視、樹障巡視、精細巡視、點雲採集、環繞飛行、雷達掃描等多達12 種作業模式,滿足不同作業的巡視需求。飛行結束後,系統還將自動對照片分類、重新命名,更新三維空間的台賬。
智巡通APP界面
激光點云三維建模技術(主網建模)
使用固定翼或直升機搭載激光雷達沿主網線路飛行,採集每節桿塔高程,GNSS等點雲數據,後續再根據點雲模型設定不同飛行模式的航線。自動巡檢就可以根據雷達點雲數據預設好的航線,實現自主繞塔和精細化巡檢。
在精細化巡檢時,相機對焦部位設置都在三維航線系統裡預先設置。先識別點雲中的部件區域,再根據焦距、拍攝距離、角度需求進行拍攝。
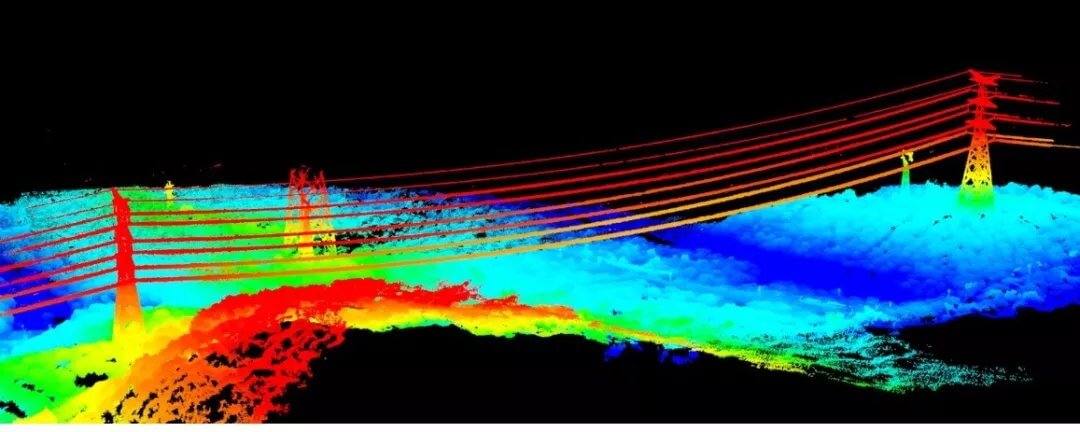
激光點雲建模
大疆智圖傾斜攝影三維建模(配網建模)
主網的自動飛行方案並不能直接在配網復用。難點在於最基礎的導航數據採集部分。配網線路,其主線和支線的關係就如同樹乾和樹枝的關係,直升機和固定翼飛機飛行速度過快,飛機太大,來回調頭效率極低,而多旋翼雷達作業硬件成本太高。另外,配網線路低矮,作業風險很大。
配網的三維建模是使用精靈4 RTK 逐步採集配網線路數據,利用大疆智圖軟件生成點云通道,最後依托點云通道計算出最佳飛行路徑,生成航線。
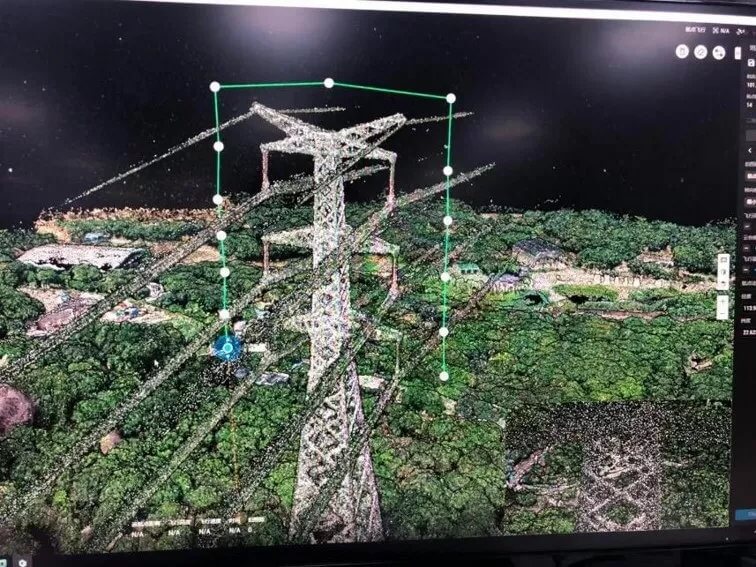 大疆智圖生成點雲模型
大疆智圖生成點雲模型
網絡RTK定位技術
精靈4RTK使用的網絡RTK定位技術是近年來在常規RTK和差分GNSS的基礎上建立起來的一種新技術。它的基本原理是在一個較大的區域內稀疏地、較均勻地佈設多個GNSS參考基準站, 構成一個基準站網, 我們就能藉鑑廣域差分GNSS和具有多個基準站的局域差分GNSS 中的基本原理和方法來設法消除或削弱各種系統誤差的影響, 獲得高精度的定位結果。簡單解釋就是,通過千尋位置預先在全國各地設置的基準站發送位置信號,結合無人機的定位計算誤差得出精準位置。特別提醒:網絡RTK模式作業前提是要有網絡信號。
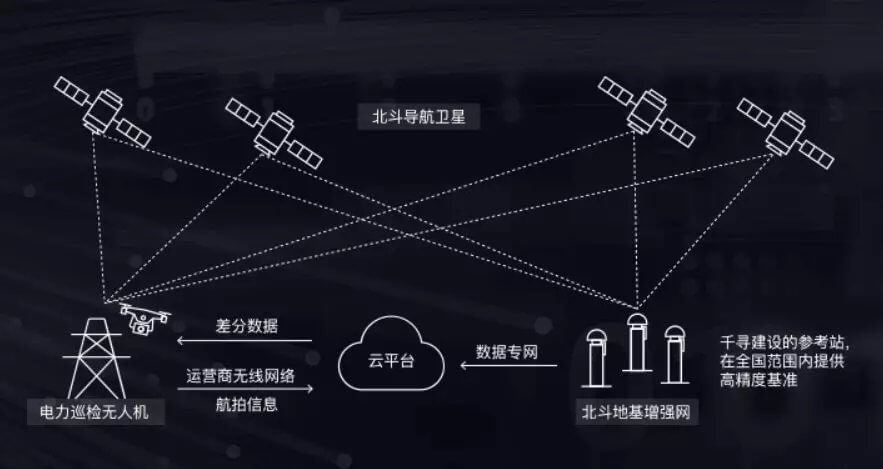 網絡RTK原理
網絡RTK原理
RTK定位技術對於自巡檢自動化至關重要,以往精細化巡檢是炸機最多、用時最長的巡檢工作項目,現在使用基於RTK定位的自動精細化巡檢,無人機可以快速精準地飛到桿塔各個掛點,而且飛行時沒有多餘的動作,省時省力安全性高。這樣飛手只需要經過基礎培訓,就可以參與到巡檢工作中,大大提升了電網巡檢效率。
本文作者是慧飛無人機應用技術培訓中心《無人機巡檢技術》課程教員王忠源,2016年開始接觸多旋翼無人機,從事慧飛無人機教學工作3年。
