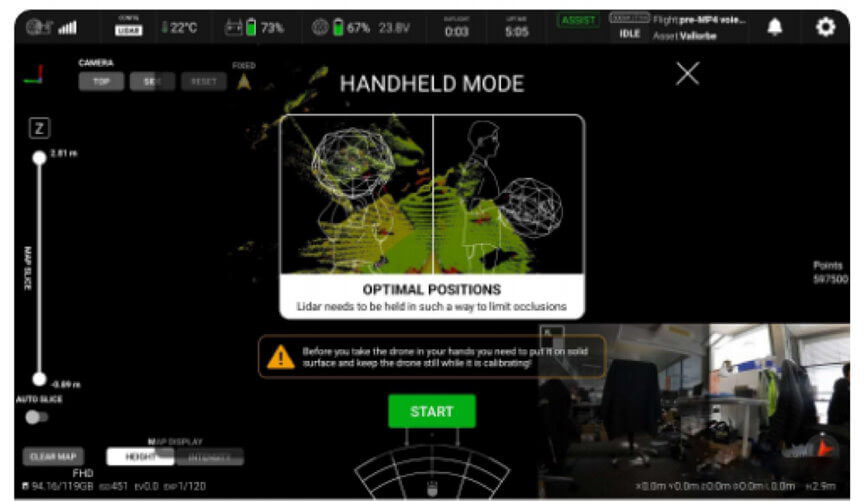
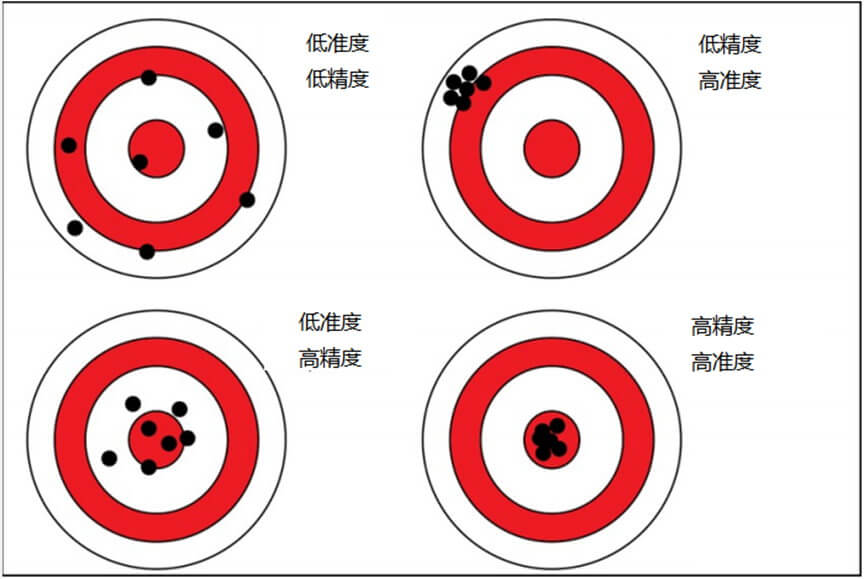
Flyability 台灣總代理 先創國際 光學雷達(LiDAR)是一種成熟的有源光學遙感技術。40多年的應用經歷證明LiDAR是一種強大的測量工具,如今,LiDAR已經涵蓋各個領域。應用於航天器、機載、海洋和陸基平台。 通過光學雷達測繪到的結果,就可以快速準確的輸出對象的數位孿生。對2D或者3D空間進行測繪。精准定位空間中的缺血位置,導出*.e57, *.las, *.laz,和*.ply等格式的通用3D文件。 當然,測繪的精度尤為重要。如果結果不能準確如實地反映出現場的情況,就將失去其原本的意義。不同於傳統的固定式激光雷達,在整個測量過程中,Elios 3 上的雷達一直會處於移動狀態。雖然SLAM 算法就是針對此類的工作模式所準備的。但是到底實際結果如何呢?今天我們將為您呈上火熱出爐的Elios 3 無人機激光雷達精準度測試: 本文將介紹GeoSLAM 和Flyability 聯合團隊測試的結果,使用Elios 3 和GeoSLAM Connect 創建3D 模型,以識別系統精度和局部精度,與市場上領先的移動地圖系統ZEB Revo 和ZEB Horizon 的對比。 Flyability 的Elios 3 配備了Ouster OS0-32 LiDAR 傳感器和SLAM 算法,因此可以在飛行中實時創建3D 模型。飛行結束後,Elios 3 用戶可以使用GeoSLAM Connect 處理他們收集的LiDAR 數據,以創建精確、準確的3D 模型。 Elios 3 在飛行過程中也能實時構建3D模型,但是您若需要高精度的結果,則還是需要使用GeoSLAM Connect 來進行點雲計算。 為了評估系統的準確性,我們進行了局部“平面到平面”分析,將Elios 3 採集到的數據與使用地面激光掃描儀採集的參考模型進行了對比。該系統的精度還通過範圍噪聲分析進行了測試。測試結果表明,帶有GeoSLAM Connect的Elios 3 無人機測繪與傳統的TLS以及市場上領先的移動測繪系統ZEB Revo和ZEB Horizon相比,準確度上不相上下。 本測試內容用於測試系統位於辦公室等中小型室內空間的精準度,如果您想了解關係地理坐標映射或者大型倉庫的測繪精準度,請期待我們的測試的下篇 我們會在文中解釋精度和準度的概念,以及我們進行測試的手法,如果您已經了解此類內容,您可以快進到實際測試內容篇進行閱讀。 在衡量系統質量時,製造商將指定一些數據指標。最廣泛使用的是準確度和精密度。測量精度最普遍地定義為測量結果與其實際(基準)值的符合程度,準度定義為多次測量顯示相同結果的程度。圖1顯示了一個目標圖,用直觀的方式展示準確度和精度之間的差異。在評估精度時,必須使用第二個測量系統來提供基準值,並且該系統必須比被測系統具有更高的精度。評估移動測繪解決方案時,行業標準是使用全站儀(TPS)或地面激光掃描儀(TLS) 。 其他經常討論的術語是局部和全局精度。但是這些術語的定義更加模糊。對於移動地圖系統,本地精度取決於同一個場景中,點雲中2個點之間的距離,例如單個房間的尺寸。全局精度取決於兩個不同場景中,點雲中2個點之間的距離,例如2個房間之間的距離。本報告將分析局部準度和精度,下一個的報告將重點關注系統的全局精度 圖示1 ,精度與準度示例 為了評估使用Elios 3無人機搭配GeoSLAM 軟件測繪的局部精度,進行了“平面到平面”分析。除了局部精度外,還進行了範圍噪聲評估以評估系統精度。 為了評估Elios 3的局部精度,我們將Elios 3的數據和地面光學掃描儀(TLS)捕獲的室內環境數據做對比。將TLS作為參考是因為它的精度優於移動平台方案,因此可以將TLS 的高精度模型作為參考標準來對比。所使用的TLS系統—— Riegl VZ-400 ,製造商聲明此設備在1-sigma 時的精度為5mm ,這意味著68%測量差值必須在5mm 範圍內。因此我們把這個結果作為對比的基準。 為了評估Elios 3平台的準確性和精確度,數據是在一個標準辦公環境中採集的,該環境具有6個測試平面,每個平面大約面積一平方米,散佈於掃描環境中。平面的位置可以在下面的圖2和圖3中看到。 圖2,圖3,圖中的藍色方塊即為參考平面以及其位置。 光學掃描參考球體(直徑145毫米)被分散放置在環境中以標定地面的輪廓,用於構建參考模型。參考模型(圖4 )如圖所示。 圖4,點雲區域 Elios 3 的飛行遵循推薦的飛行指南來進行,在同一地點起飛和降落。掃描軌跡(飛行路徑)如圖5所示。完成了辦公室的一個完整環路以及兩條走廊相交處的另一個小環路飛行。Elios 3 LiDAR Sensor (Ouster OS0-32)數據使用GeoSLAM Connect v2.1.0進行處理,過濾&刪除異常值,並以LAZ格式導出(圖6 )。 圖5 (左), Elios3飛行軌跡 通過將Elios 3數據和參考模型進行平面擬合,並評估平面之間的法線距離,即可進行平面到平面比較。使用PolyWorks MRS2019 IR3軟件來實現的。該評估能夠識別點雲的局部精度以及點雲上的任何變化。 為了評估Elios 3的精度,我們進行了範圍噪聲分析。範圍噪聲指的是每個範圍讀數(點)與所選區域內的平均範圍值之間的差異。選擇用於評估範圍噪聲的區域是“平面到平面比較”中所提取的平面的表面。距離噪聲表示為與平面平均點的標準偏差。因此標準偏差將是系統精度的度量,並被賦予1-sigma 。標準偏差差值則使用PolyWorks MRS2019 IR3來計算。
局部精度 通過“平面到平面”分析評估局部精度。參考模型中的平面與具有GeoSLAM Connect 數據的Elios 3中的平面之間的法線距離如表1所示。結果表明,所有差值都在+/- 16mm範圍內,而Elios 3和參考模型的平均法線差值絕對距離為8mm 名字 差值 平面1 6mm 平面2 0mm 平面3 -16mm 平面4 -10mm 平面5 -13mm 平面6 -3mm 均值–絕對差值 8mm 表格1 全局精度 對Elios 3的數據進行標準偏差計算的範圍噪聲分析結果如表2所示。這些結果表明,所有平面的標準偏差都在15mm以內,平均標準偏差為8 mm每1-sigma 。
名字 差值 測試1 7mm 測試2 7mm 測試3 8mm 測試4 6mm 測試5 6mm 平均值 8mm 表格2 “平面到平面”分析顯示 Elios3 移動測繪平台的局部精度測試所得到的平均法向差距為8 mm 。 評估系統精度時,距離噪聲結果顯示平均標準偏差為8mm每1-sigma 。 結果表明,對於辦公室空間或類似尺寸的空間結構的測繪結果。Elios3移動測繪平台與傳統的TLS平台以及配有ZEB Revo和ZEB Horizon的設備相比,精度和準度不相上下。 換而言之,和傳統的固定式光學雷達相比,Elios3在此類空間中的測量精準度都不遜於傳統設備。一旦考慮到Elios3的便攜性和工作速度,則Elios3將在很大程度上代替傳統的固定式光學雷達。 Flyability是一家瑞士公司,致力於為室內,人跡罕至和狹窄的空間進行檢查和探索的解決方案。通過在建築物內安全使用無人機,它使工業公司和檢驗員可以減少停機時間,檢驗成本和對工人的風險。 Flyability在50多個國家/地區的發電,石油和天然氣,化工,海事,基礎設施和公共事業以及公共安全領域擁有數百名客戶, Flyability處於業界前沿並繼續引領商業室內無人機領域的創新。 有關更多信息,請訪問 www.flyability.com 產業解決方案 無人機行業檢測服務 無人機考照及操作訓練Flyability Elios 3光學雷達的精準度測試(上篇)
術語
精度評判
測試環境
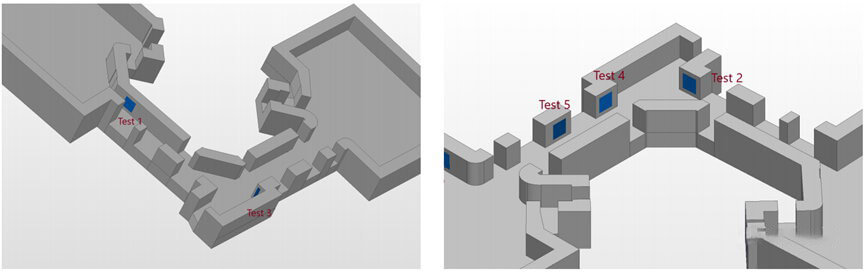
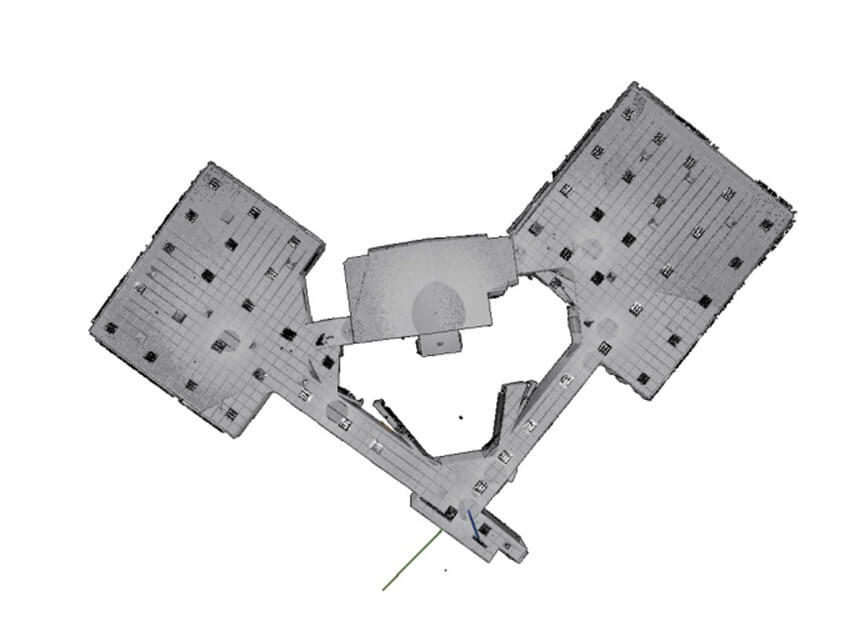
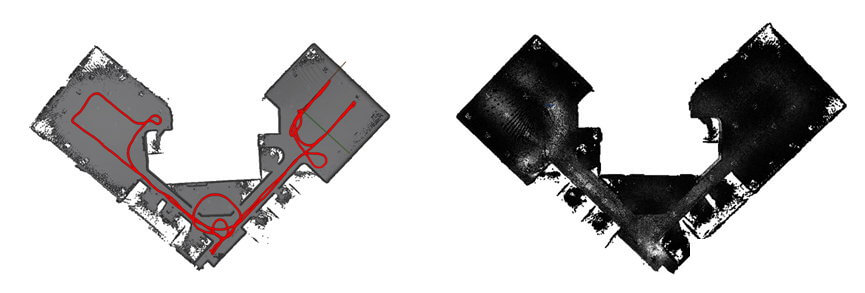
圖6 (右), Elios3點雲結果(使用GeoSLAM Connect v2.1.0建模)計算局部精度
計算全局精度
測試結果
結論
關於Flyability
台灣總代理 先創國際
關於先創國際
先創國際提供的產業解決方案,包含航拍無人機、STEAM教育、遠端會議與客服中心設備、以及AR/VR影像等商務/行業應用領域,以客戶為中心、高品質產品為基礎、專業知能與服務為後盾,服務對象包含政府機關、公司企業、學校單位,擁有優良口碑與實績。
對於密閉狹窄空間(例如:鍋爐儲槽設備、工業煙囪、橋樑箱涵、下水道、輸送管路…等)非破壞性檢查,空拍攝影、影像3D建圖、我們有專業的檢測服務團隊,提供更安全且有效率的檢測方式。
因應民航法規新制實施,規劃考照訓練課程,提供個人考照及企業建置專業飛手的客製課程,並由經驗豐富的講師群進行教學輔導。




先創國際股份有限公司
專業代理經嚴格評鑑、篩選的世界知名一流品牌,並深耕各類型通路與網絡。近年來更積極拓展公部門、教育單位、及企業用戶,提出各項解決方案。專業形象和熱誠服務獲得市場普遍肯定。
統一編號:80282240
—
台北總公司/售後服務中心
114台北市內湖區瑞光路66巷25號1樓
Tel: (02)8792-8855 # 分機160~163
台中分公司
台中市西區公益路161號8樓之9 (I室)
Tel: (04)2302-1133
高雄分公司
高雄市三民區九如一路502號13樓B6
Tel: (07)390-0988
—
營業時間: 星期一~星期五 9:00~18:00 (不含國定例假日)。
客服信箱:service@esentra.com.tw
—