UTC無人機培訓總部 楊嘉霖
DJI Mavic 3 行業系列無人機新增了智能環繞功能,可以更加方便快捷地圍繞目標點環繞飛行,從而實現對目標的多方位觀察,或拍攝用於三維重建的照片。 在本文中,我將向大家介紹此功能。請確保DJI Pilot 2 App、飛行器和遙控器都已升級至最新版本。下文以美國手為例進行講解。
確保固件更新到最新版本
確保軟件更新到最新版本
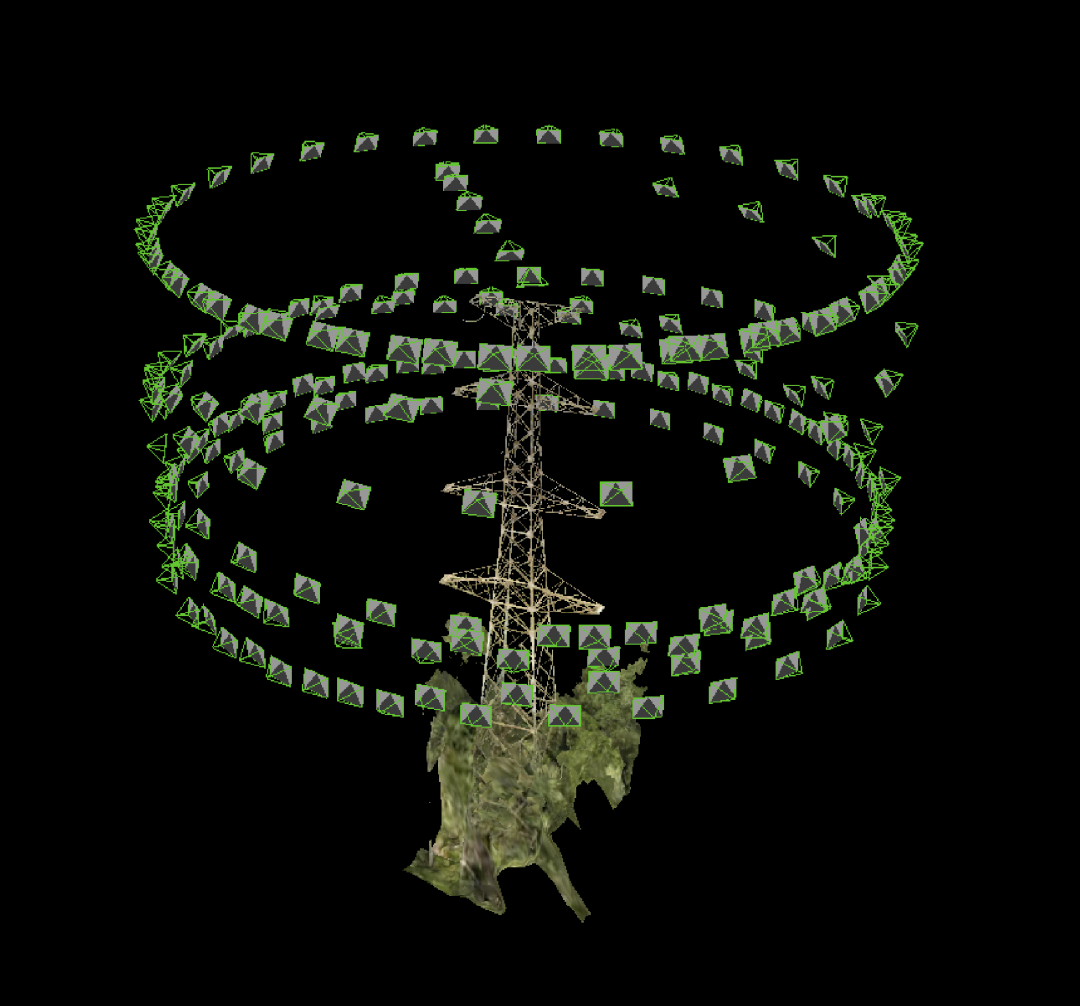
搭配定時拍照和大疆智圖,可對三維模型進行重建
首先,我們需要確定智能環繞的圓心,可通過創建目標點(以下簡稱打點)的方式實現。可以在地圖界面中,將畫面中心定位至圓心處進行打點;也可以將飛行器飛至目標點正上方進行打點。
使用飛行器打點時,可將雲台俯仰角調整至-90º,以協助定位
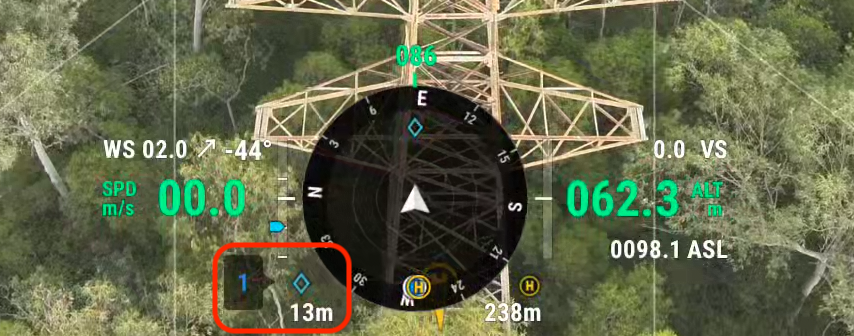
其次,我們需要調整環繞的半徑。建議使用向前飛行的方式調整半徑,並確保環繞路徑內無障礙物,以確保飛行安全。可通過導航信息模塊左下方數字了解當前環繞半徑。
此處顯示圓心目標點名稱及環繞半徑
接下來,我們需要調整雲台角度。確保飛行模式為N 檔,點擊智能環繞圖標,微調雲台角度。大部份情況下,目標點都位於觀察目標的上方,所以需要調整雲台看向觀察目標。
開啟環繞後,調整雲台以看向觀察目標
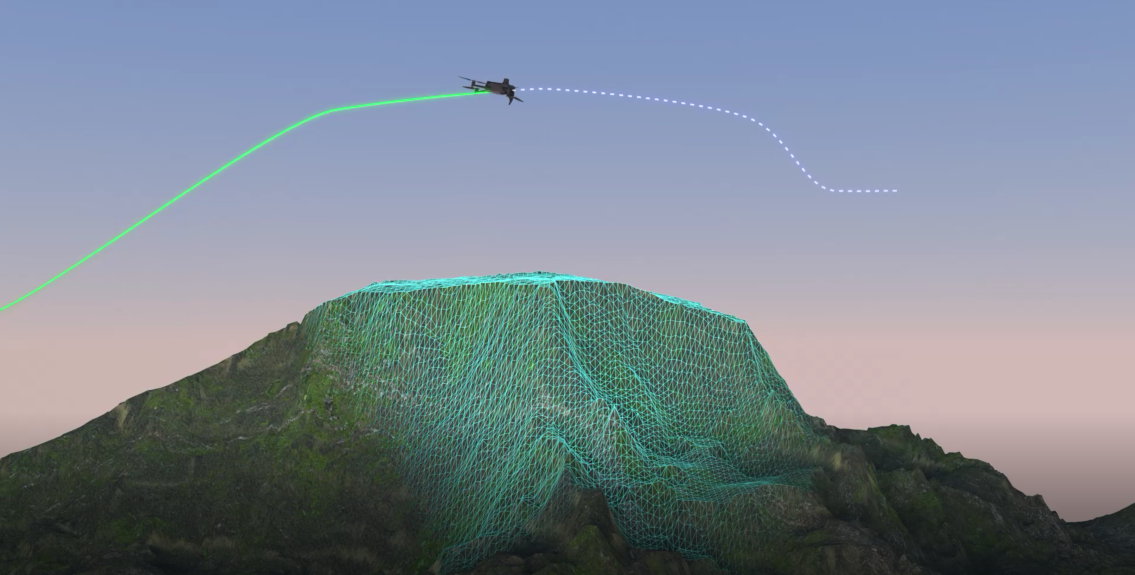
下一步,我們開始環繞飛行並調整飛行速度。開啟智能環繞功能後,飛行界面中會出現環繞速度指示條,同時地圖界面會顯示綠色的環繞軌跡。操作右搖桿向左或向右,飛行器向相同方向開始環繞飛行。飛行過程中,可以通過點擊畫面圖標或C1 按鍵實現定速環繞,再次點擊則解除定速。定速環繞飛行中,可通過搖桿手動調整飛行速度。搭配定時拍照和視頻錄製功能,智能環繞功能可滿足目標巡檢、建模拍攝等多種場景需求。
開啟定速後,速度指示條顏色變為綠色
手動調整部分在速度指示條中表現為黃色
環繞過程中,搭配定時拍照(配圖為延時視頻)
在環繞過程中,可通過遙控器調整速度、半徑、構圖和高度等。如果在環繞飛行過程中調整了半徑和高度,雲台俯仰角將自動調整,以確保相機始終朝向觀察目標。智能環繞飛行結束後,點擊圖標退出此模式。
下圖示範不同操作所對應的調整內容:
右搖桿的左右方向可控制飛行器的環繞速度
右搖桿的前後方向可擴大或縮小環繞半徑
左搖桿的左右方向可控制環繞時的畫面構圖
左搖桿的上下方向可控制環繞飛行的高度
調整雲台俯仰角可改變相機朝向
任務結束後切記退出智能環繞模式,避免影響飛行安全
1、如果地圖中存在多個目標點,需要提前在地圖界面選中環繞目標點。
2、智能環繞過程中,拍攝模式建議使用單拍、定時拍和視頻錄像功能。
3、智能環繞過程中,在光照等環境條件滿足視覺系統需求時,即使避障行為選擇“繞行”,飛行器遇到障礙物依然會執行剎停行為。
注意避障行為的選擇
4、智能環繞時的最大飛行速度受環繞半徑影響。若環繞半徑較小,則最大環繞速度也會變小。
5、為了減少智能環繞時發生圖傳斷聯的情況,建議使用4G 增強圖傳功能(需額外購買配件),並且在飛前檢查菜單中將失聯行為設置為“懸停”。
6、為確保飛行安全,需要在飛前檢查菜單中設置安全的返航高度。
確保返航高度高於障礙物,失聯行為可設置為“懸停”
以上就是DJI Mavic 3 行業系列無人機智能環繞功能的操作流程介紹。希望今天分享的內容能夠幫助到各位飛手更好地了解和掌握智能環繞功能的相關知識。如果您覺得這篇文章有幫助,不妨點贊、分享和收藏,感謝大家的支持。
DJI Mavic 3 行業系列智能環繞功能詳細介紹


操作流程










注意事項


















先創國際股份有限公司
專業代理經嚴格評鑑、篩選的世界知名一流品牌,並深耕各類型通路與網絡。近年來更積極拓展公部門、教育單位、及企業用戶,提出各項解決方案。專業形象和熱誠服務獲得市場普遍肯定。
統一編號:80282240
—
台北總公司/售後服務中心
114台北市內湖區瑞光路66巷25號1樓
Tel: (02)8792-8855 # 分機160~163
台中分公司
台中市西區公益路161號8樓之9 (I室)
Tel: (04)2302-1133
高雄分公司
高雄市三民區九如一路502號13樓B6
Tel: (07)390-0988
—
營業時間: 星期一~星期五 9:00~18:00 (不含國定例假日)。
客服信箱:service@esentra.com.tw
—