UTC無人機應用技術培訓中心總部王忠源
第一步:開啟在線任務錄製
檢查飛行器狀態,可使用M300 RTK、禦2行業進階版、精靈4RTK等帶RTK模塊的機型,以M300 RTK為例,打開DJI Pilot,點擊“航線飛行”-“航點飛行”-“在線任務錄製”;
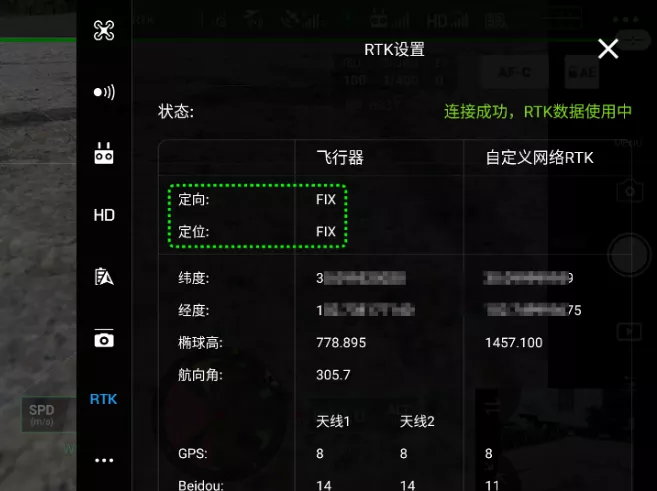
第二步:開啟網絡RTK功能
開啟網絡RTK功能,並選擇合適的大地坐標系(大疆智圖支持CGCS2000大地坐標系下採集的激光雷達點雲數據重建),在起飛前確認飛行器已處於RTK FIX狀態且聽到“已連接RTK,將記錄飛行器的絕對高度”語音提示;
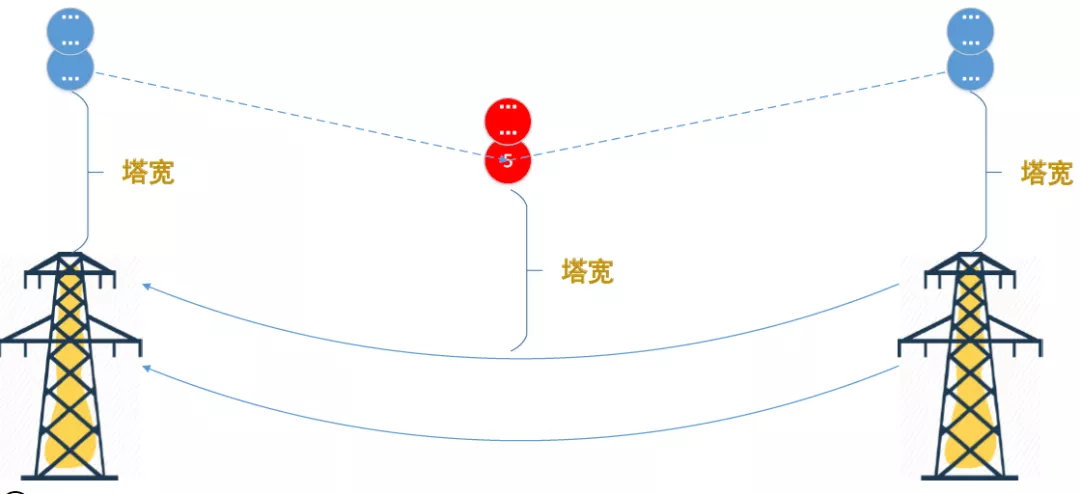
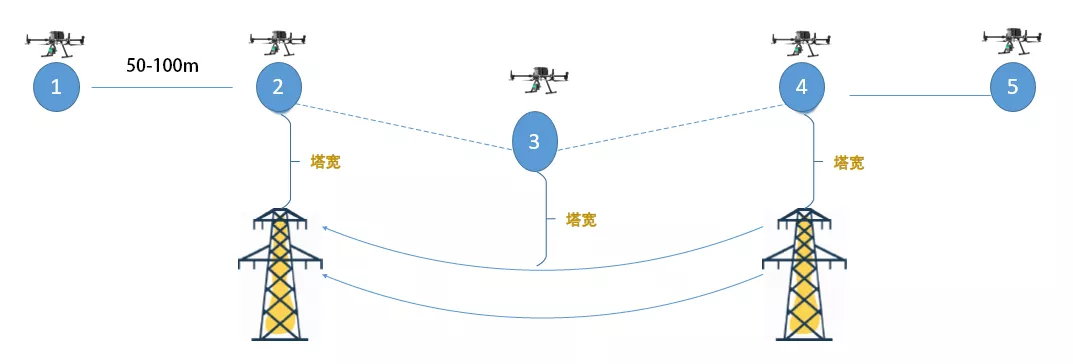
第三步:桿塔正上方打點
在桿塔正上方合適高度處,按拍照鍵添加航點並拍攝照片。 為保證塔身的完整性,建議航點距離塔頂高度為塔的寬度,一般在20-30米,可將M300下視避障調整為30米,通過避障提示來確認距離塔頂的相對高度。
(參考:對於常見的輸電線路,我們發現禦2進階版可見光相機(1倍變焦狀態)或L1的測繪相機在雲台偏航回中、俯仰角-90度,當輔助網格線的兩條豎線分別與左、右回上相導線大致重疊時,由此打點創建的航線可使採集的點雲覆蓋範圍較好)
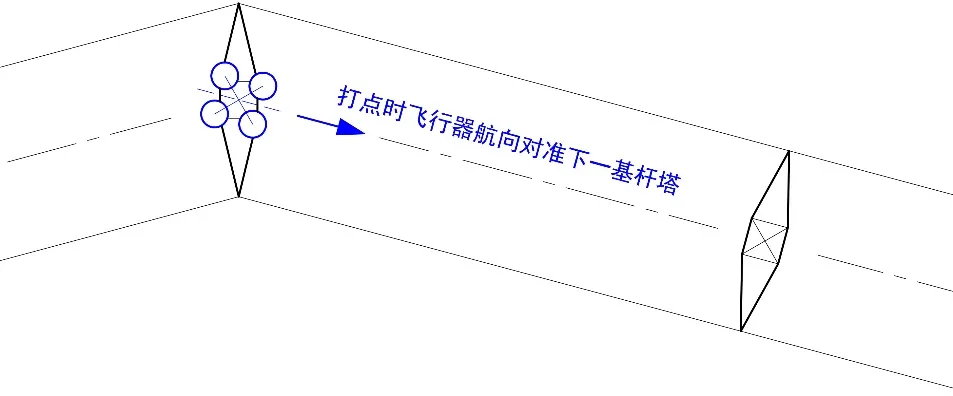
飛行器在打點時(特別是打點所在桿塔為大轉角塔時)航向對準下一基桿塔,可使創建的自動飛行航線與線路走向高度一致;
第四步:弧垂處打點
對於弧垂較大的檔(如落差超過50米),可考慮在最大弧垂點上方適當高度(如30米)點擊拍照按鍵,添加一個航點並記錄照片,使該檔點雲採集質量更好。
第五步:首尾處增加航點
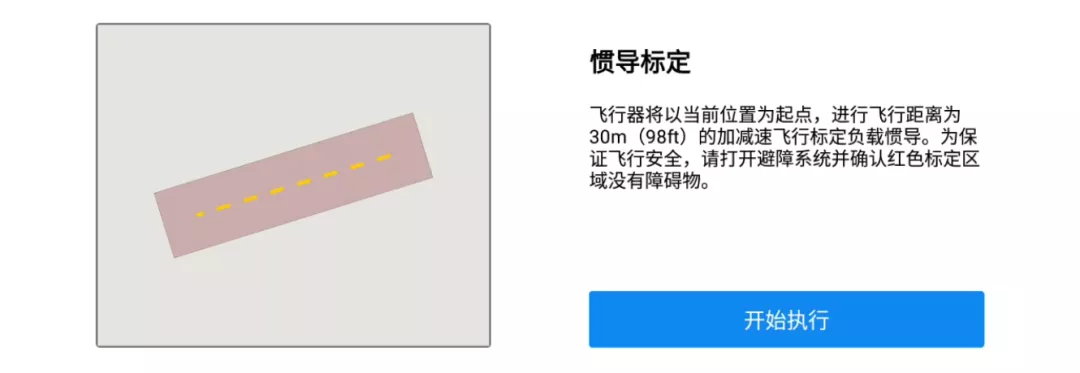
在作業點距首末端桿塔(遠離作業區段方向)約50-100米水平距離處,線路正上方合適高度添加輔助航線,以確保首尾桿塔點雲被充分採集且有足夠的距離進行慣導標定(慣導標定需要有至少30米的距離空間,故首航點與第二個航點應至少留有30米以上的距離,尾航點同理)。
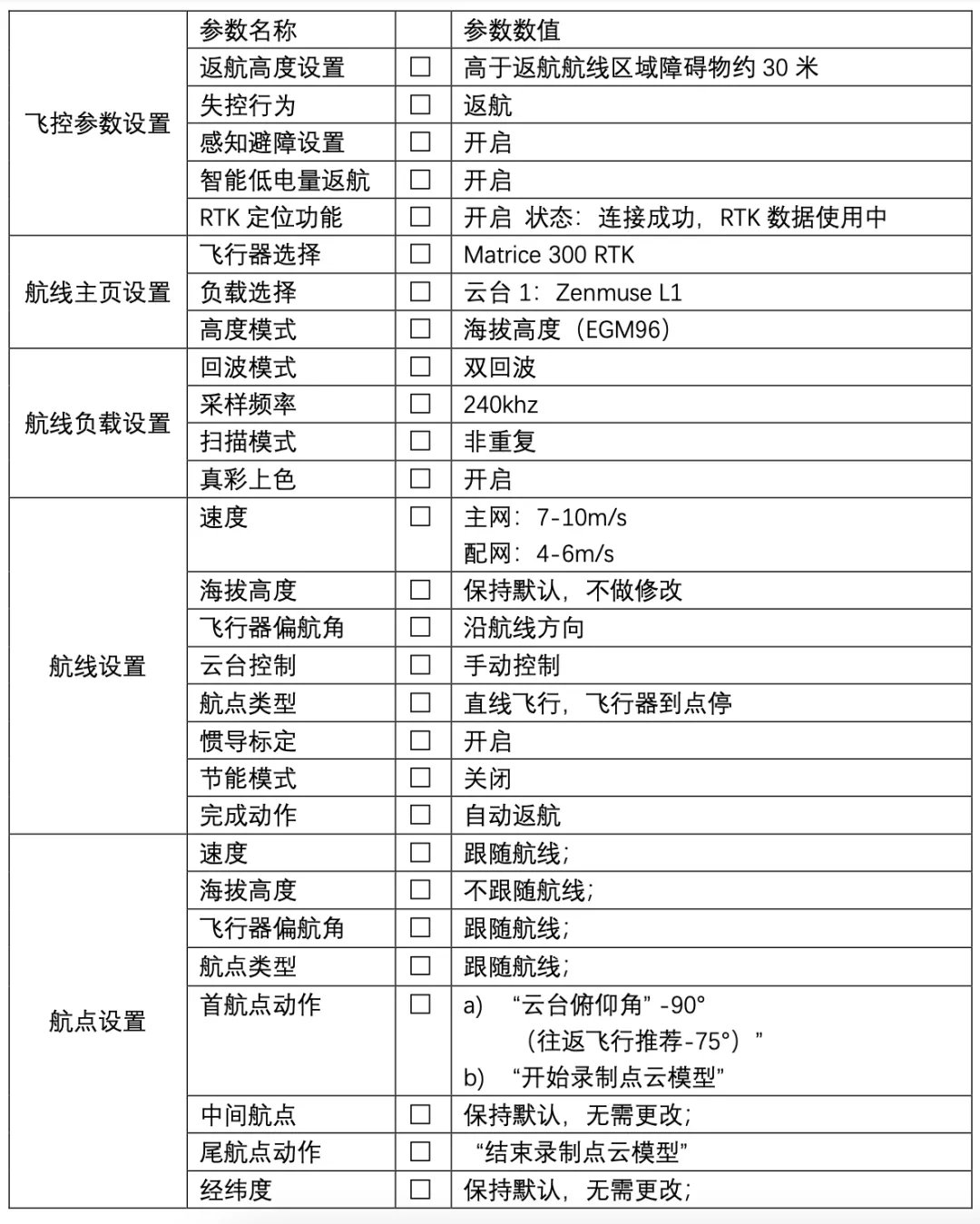
第六步:航線(全局)設置 a) 速度: 與點云密度成反比,綜合考慮效率和效果,推薦設置在6-10m/s 左右; b) 海拔高度: 保持默認,不做修改; c) 飛行器偏航角: 設置為“沿航線方向”; d) 雲台控制: 設置為“手動控制”,雲台俯仰角根據作業類型調整,單程推薦-90°、往返推薦-75°。 e) 航點類型: 設置為“直線飛行,飛行器到點停”。 f) 慣導標定: g) 節能模式: h) 完成動作:
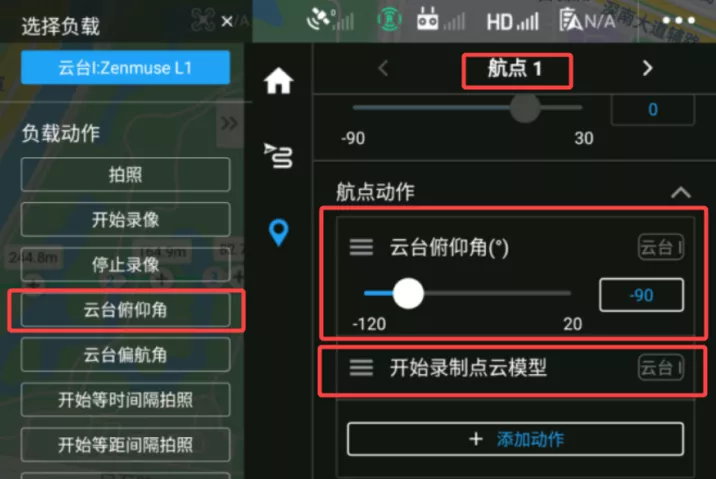
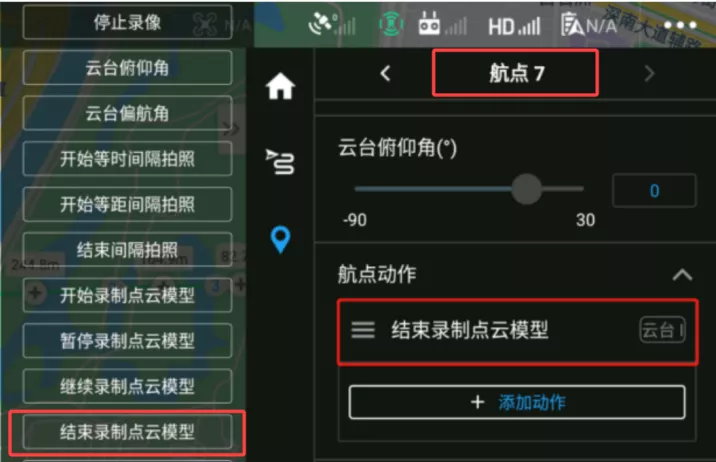
第七步:航點動作
首航點: 航點動作添加“雲台俯仰角”,數值設置-90°;“開始錄製點雲模型”; 尾航點: 航點動作添加“結束錄製點雲模型”; 所有航點的速度、飛行器偏航角、航點類型均勾選“跟隨航線”,海拔高度不勾選“跟隨航線”。
注意:添加“開始錄製點雲模型”航點動作並打開慣導標定後,L1會根據航線自動進行標定,無需手動干預。若航線未出現黃色標定線段,可能是因地圖比例尺關係,黃色線段被航點圖標遮擋,可嘗試放大航線發現黃色標定線段。
第八步『選用』:往返航線
主網大落差環境,建議將航線複製一份,進行來回兩次掃描,複製的航線調轉首尾航點,並交換首尾航點動作設置。
第九步:KML航線導出與導入
按照以上方法,將航線內所有坐標採集完並保存任務。選擇航線並導出kml航線文件至MicroSD卡。 使用M300 RTK帶屏遙控器,插入MicroSD卡並在Pilot App-航線飛行中導入相應航線。 確認設備狀態正常後,即可開始外業任務。
第十步「選用」:讀取照片內坐標
用戶也可通過照片信息讀取桿塔坐標並記錄存檔。後續可用於生成KML航線,台賬記錄等。若計劃從照片導出經緯度和高程數據,可採用圖新地球軟件的免費功能提取坐標並保存。
照片坐標提取詳細操作步驟如下: a) 打開圖新地球LSV,點擊“工具箱”中的“照片GPS提取”功能
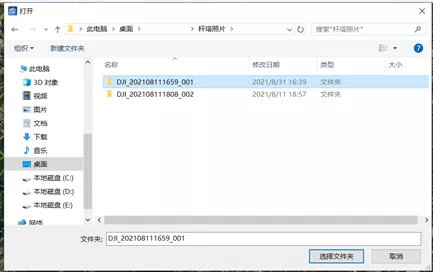
b) 點擊“選擇照片文件夾”打開需導出坐標的照片文件夾
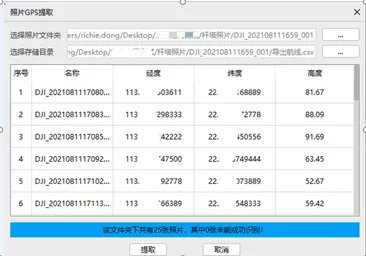
c) 圖新地球LSV會自動讀取照片中的坐標信息,完成讀取後,我們點擊“選擇存儲目錄”即可將經緯度和高程信息存檔(文檔為csv表格格式)。
d) 注意:圖新地球LSV會根據照片拍攝的時間順序生成對應的航線,所以還請採集照片過程中按照線路塔號順序依次拍攝,不要跳拍或者隨意更換拍攝順序,否則會造成航線與實際線路不一致等問題。
*十步教學-使用DJI L1採集電網點雲模型
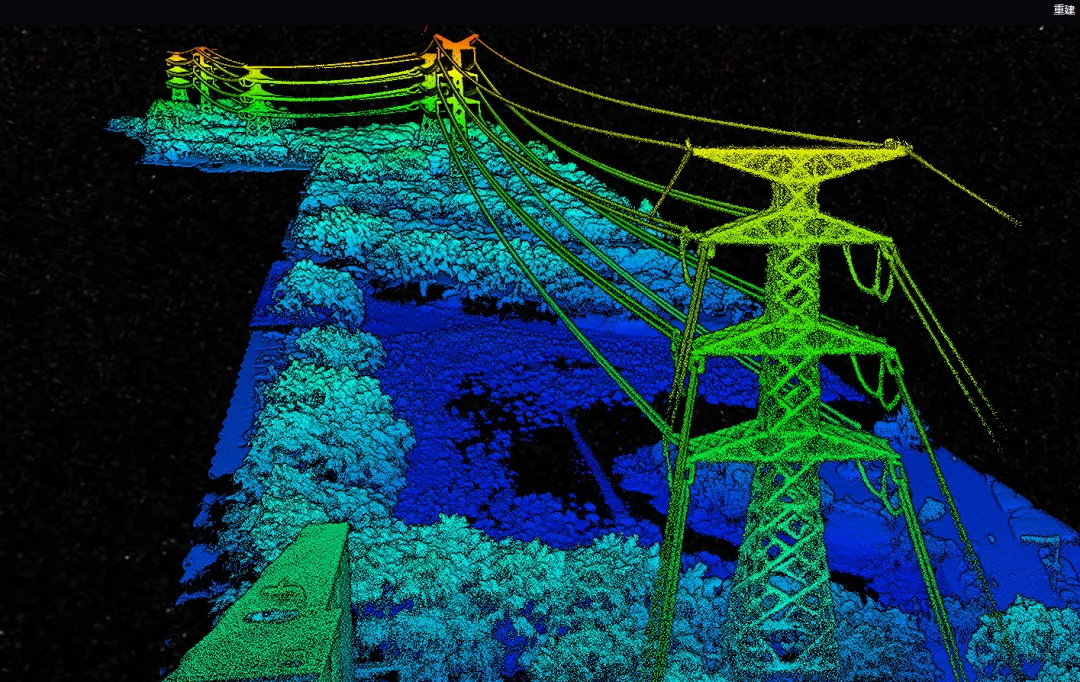
適用情況一:
巡檢區域環境複雜
或不確定電網線路的準確坐標,
但巡檢線路有網絡RTK信號覆蓋。

![]()







UTC無人機應用技術培訓中心,專注於無人機在各行業的應用,量身定制專業課程,讓從業者將先進無人機技術應用在工作,獲得領先行業的效率、安全性與工作成果。
先創國際股份有限公司
專業代理經嚴格評鑑、篩選的世界知名一流品牌,並深耕各類型通路與網絡。近年來更積極拓展公部門、教育單位、及企業用戶,提出各項解決方案。專業形象和熱誠服務獲得市場普遍肯定。
統一編號:80282240
—
台北總公司/售後服務中心
114台北市內湖區瑞光路66巷25號1樓
Tel: (02)8792-8855 # 分機160~163
台中分公司
台中市西區公益路161號8樓之9 (I室)
Tel: (04)2302-1133
高雄分公司
高雄市三民區九如一路502號13樓B6
Tel: (07)390-0988
—
營業時間: 星期一~星期五 9:00~18:00 (不含國定例假日)。
客服信箱:service@esentra.com.tw
—

