Jabra售後維修訊息公告

由於Jabra原廠政策變更,Jabra消費型商品將統一由原廠委託之服務中心承接維修服務。
自2019/08/22起,Jabra維修客服請洽Jabra 售後服務中心
- 服務電郵: jabrasupport@en-sonic.com.tw
- 公司電話: 02-2704-3883
- 客服專線: 0901272388
自2019/08/22起,Jabra維修客服請洽Jabra 售後服務中心

什麼是紅外熱成像技術?

電力設備為什麼需要檢測溫度?

電力設備溫差示意圖
紅外熱成像在電力巡檢中的優勢
1.非接觸,更安全。
紅外熱成像技術具有遠距離、不接觸、不取樣、不觸體的特點,在監測和排查電力設備時無需直接觸碰,有效避免事故發生。同時,由於不需要與被測物接觸,紅外熱像儀可在電力設備帶電時進行檢測工作,降低成本。
2.成像直觀,易發現異常。
通過對溫度的精準感知,紅外熱成像可以直觀顯示出溫度異常處,便於發現故障及隱患。
3.不受電磁干擾。
高壓線、變電站附近通常有較大的磁場干擾,而紅外熱像儀的工作波段在3 ~ 5 μm和7.5 ~ 13 μm,與電磁頻譜相隔甚遠,即使在強電磁場的場所使用也不會受到干擾,得到穩定、可靠的熱成像。
4.覆蓋廣,更高效。
在電力巡檢中,紅外熱像儀經常與無人機搭配使用,在檢測熱點故障時,搭載紅外熱像儀的無人機往往與設備保持幾米、幾十米的距離,輕易實現大面積檢測。在視場內發現熱點異常情況後,運維人員再針對性進行檢測,巡檢效率極高。

採用無人機搭配紅外熱成像進行電力巡檢
紅外熱成像判讀小技巧
有經驗的電力巡檢人員能很快地借助熱成像發現電力設備的缺陷,並根據熱態將缺陷進行評級分類,如一般缺陷、嚴重缺陷、危急缺陷等。他們常使用的判讀方法有:表面溫度判斷法、同類比較法、相對溫差法等。

以“預知“代替“搶救“
在電力運維中,紅外熱成像等感知技術的應用能準確直觀地發現故障點,協助判斷電力設備狀態,幫助現代電力運維從傳統的“定期維修”、“故障維修”轉化為“預知性檢修”,全面提升電力供應的穩定性與可靠性。

禪思XT2 雙光熱成像相機
Insta360
第一次坐直升機
在洛杉磯的海灘看金色的夕陽
知名Vlog 影視颶風Tim
帶著 Insta360 ONE X 拍下了在洛杉磯的一天
美國西海岸究竟有多美?
跟著Tim 的鏡頭一起看看
▽
為什麼Tim 帶了全景相機去旅行?
因為旅途中的美好事物總是很短暫
第一次坐直升機、跳傘、潛水…
可能沒等反應過來就結束了
然而,如果你有一台全景相機
“ 就可以把身邊所有事情給抓下來
說白了就是可以重新回到這個時間點”
Tim 360° 拍下了第一次坐直升機的視頻
比如在聖莫妮卡海灘
最美的夕陽,時間卻很短
這個時候如果用全景相機
就能同時捕捉海灘美景、自己身影
還有天上瞬間飛過的鳥
▽
那些轉瞬即逝的事物,都能被360° 拍下來
那為什麼要帶Insta360 全景相機去旅行?
原 因 很 多
▽
搭載FlowState超級防抖
任何手抖的小白都能隨便拍出超平穩視頻
以往只有專業攝影師才能拍出的
斗轉星移、移動延時大片效果
每個攝影小白拿著ONE X
邊走邊拍就能拍出來
▽
一鍵切換成小行星視角
好玩新奇,脫穎而出
旅行出遊、假日旅拍
你需要一台Insta360 ONE X
點擊“ 此處”,立即入手
原創:Insta360
如何在旅行中拍出好玩的旅拍Vlog?
Insta360學院Vlog培訓課第一期,人氣Vlog王怡蘇,將親自示範給你看!
旅行時只顧著拍攝
來不及欣賞當下的風景?
其實只需一個秘密武器就能解決問題
它就是王怡蘇手上的 Insta360 ONE X
▽

ONE X全景相機支持360°拍攝
無論是風景,還是看風景的你,都能入鏡
再也不用考慮構圖取景
拿著相機隨便走隨便拍,相當輕鬆![]()
用ONE X一鍵拍出小行星視角
在不同的場景下跳躍
這樣的旅拍打卡,絕對刷爆朋友圈!
怎麼給旅拍視頻增加“大片感”?
一個時空穿梭的移動延時片段就夠了
拍攝方法簡單到你不敢相信
只要拿著 ONE X邊走邊拍
後期在手機上調整一下就可以了!
王怡甦的三個旅拍小訣竅你都學會了嗎?
我們將陸續發布 Vlog導師培訓課程
手把手教你拍出更優質、更有意思的Vlog
第一期就是本次的王怡蘇旅拍教程
點擊影片,了解 ONE X 更多
點擊“ 此處 ”,立即購買 Insta360 ONE X 全景相機
原創: Enterprise DJI大疆行業應用

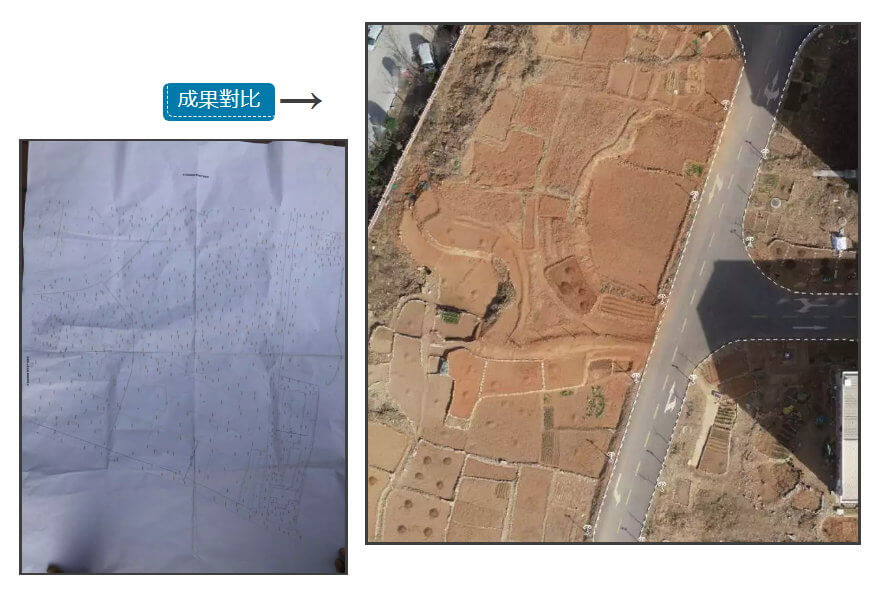
工程概況

作業流程
作業設備
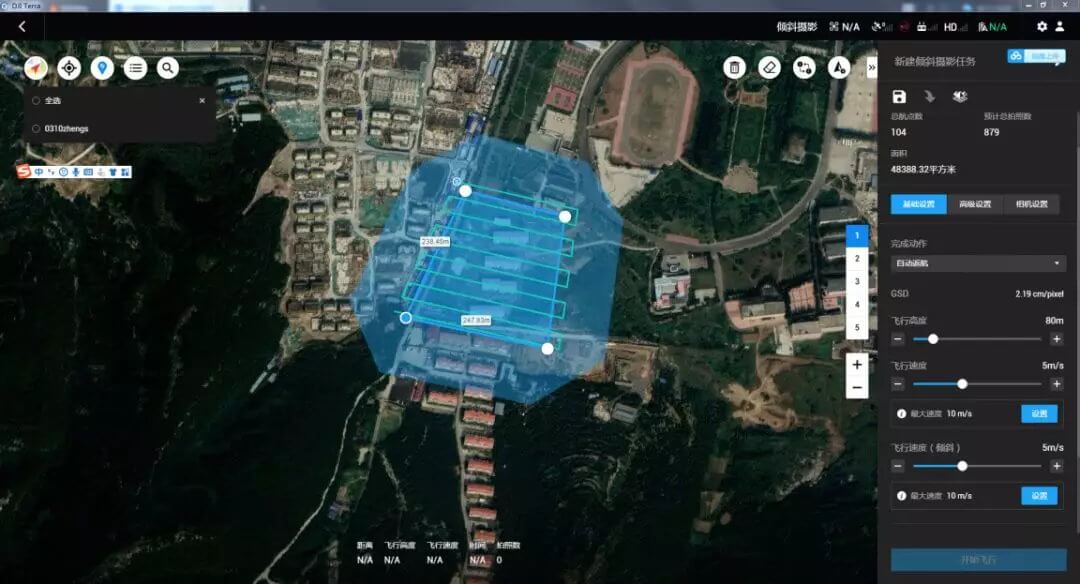
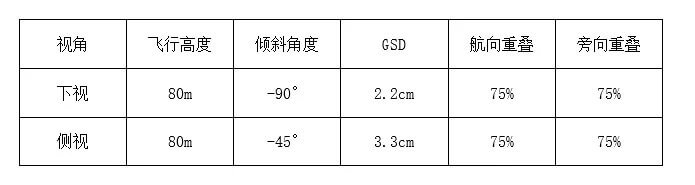
航線規劃與飛行設置
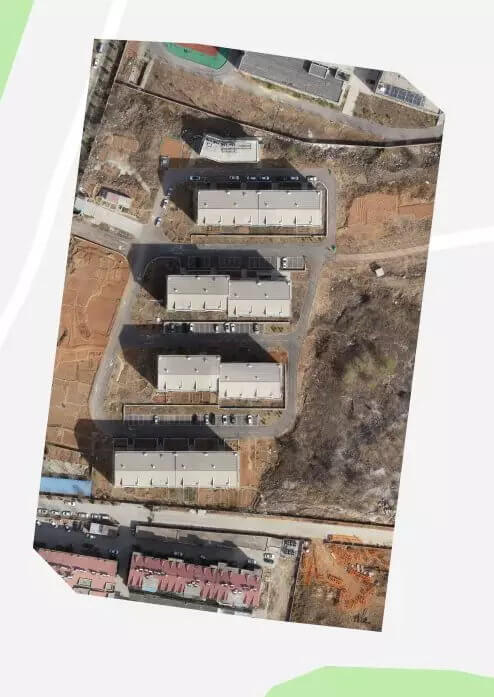
自動正射鑲嵌與傾斜三維實景建模

DLG 數據採集
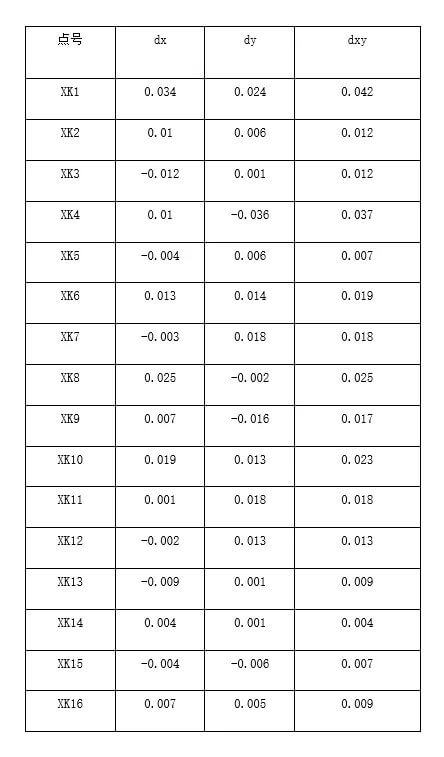
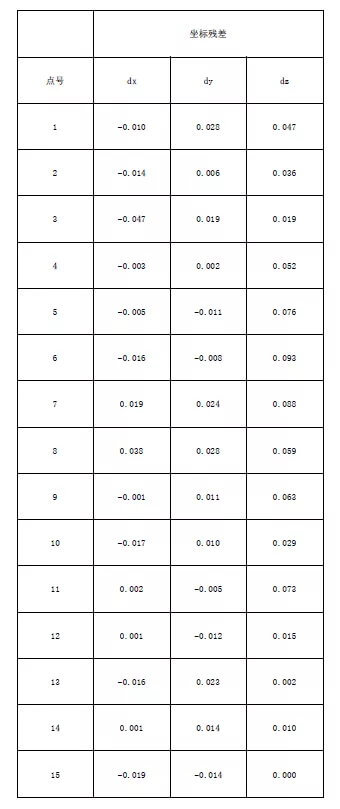
精度驗證
>
總結

為滿足竣工規劃核實的行政時限需求,更快更及時地交付規劃核實報告,大幅減少外業測量和內業質量審查時間,引進無人機進行傾斜建模已成為優選方案之一。
更多了解以及購買 DJI 大疆精靈 Phantom 4 RTK
在歷史的長流裡
「文物」與「古建築」
承載著人類文明的發展
但隨著時代的變遷這些“寶藏”
也經歷著風吹雨打與人為損壞
在久經磨難後它們如何被修繕重建?
而對於古建築的保護又有什麼更有效的方式呢?
DJI大疆行業應用給出了專業的答案

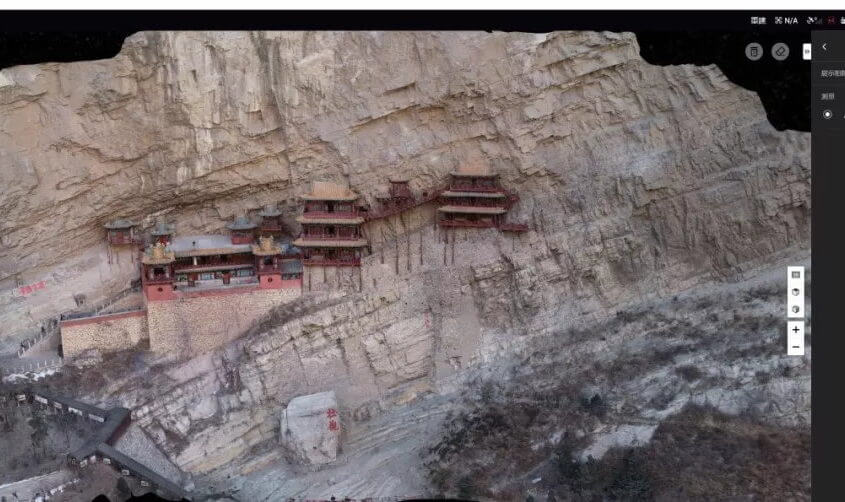
今年3月,DJI大疆行業應用與武漢大學張祖勳院士團隊合作,為山西大同懸空寺建立高精度實景三維模型,為文物古蹟數字化提供技術支持,進而推動文物的研究、分析及保護。
– 懸空寺簡介 –
懸空寺位於山西省大同市渾源縣恆山金龍峽西側翠屏峰的峭壁間,以如臨深淵的險峻而著稱。其原名為“玄空閣”,“玄”取自於中國傳統宗教道教教理,“空”則來源於佛教的教理,後因整座寺院就像懸掛在懸崖之上而改名為“懸空寺” 。金庸先生稱其:“於松不能生,猿不能攀之處,發偌大願力,憑空建寺”。2010 年,懸空寺入選《時代周刊》世界岌岌可危十大建築。
點擊觀看懸空寺三維模型
影像採集的挑戰

傳統的近景攝影測量方式一般是人工手持或者安裝腳架進行拍攝、測量,這樣具有極大的作業風險,並且無法拍攝到高空的立面場景。如果採用固定翼航測方式,險峻的峭壁環境無法為固定翼飛機提供足夠的起降空間;即便從遠處起飛,固定翼飛機因無法懸停,同樣難以採集到立面影像。
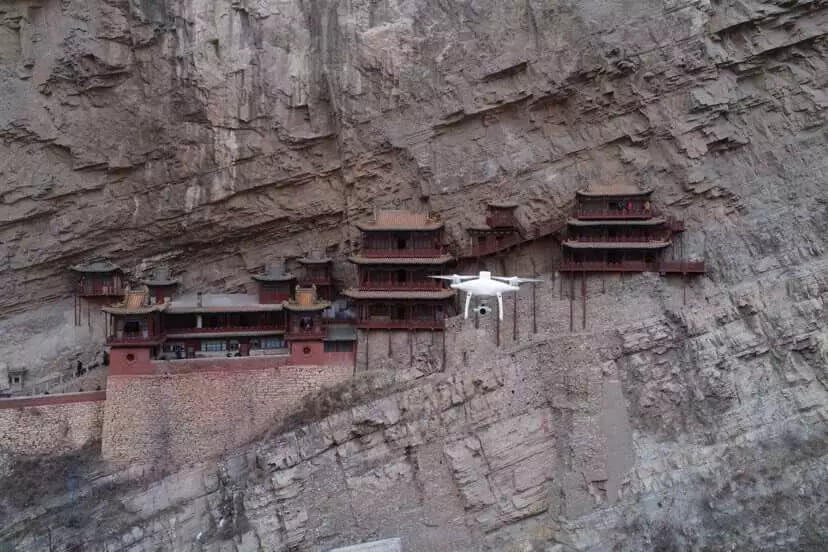
而對於可在空中自由懸停的多旋翼無人機而言,這些挑戰迎刃而解。本次採集數據使用的是精靈Phantom 4 RTK ,它的軸距僅有350毫米,重量1391克,可由單人攜帶並且可在狹窄的空間自由起飛。 懸空寺所在的金龍峽是一個南北通透的峽谷,精靈Phantom 4 RTK克服了穿堂風的阻礙成功起飛。在沒有地面控制點的情況下,精靈Phantom 4 RTK仍可通過RTK提供的精准定位信息和高精度成像系統實現高達3厘米的平面精度和5厘米的高程精度
三維建模精準還原
整座寺廟呈“一院兩樓”般佈局,總長約32米,樓閣殿宇40間,構件變化繁多,建模工作量巨大。大疆智圖在6個小時內就完成了730張影像的高精度三維重建。整個建模過程全自動,無需人為再進行參數調整。

懸空寺佈局極為緊湊,六座殿閣相互交叉,棧道飛架,虛實相生,空間層次豐富。大疆智圖重建的高精度三維模型精準還原了建築內的錯落變化,大到滑坡,小至建築內的一根木頭斷裂,皆可清晰重現。
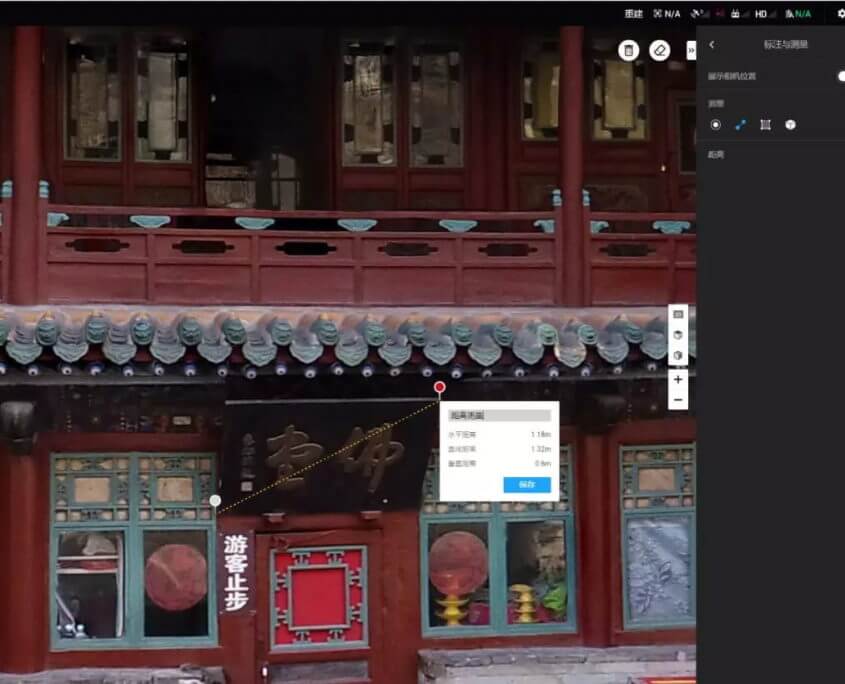
距離測量
工作人員在三維模型上點擊目標部位,可以輕鬆測量出對應的坐標、距離、面積和體積,將原本只能由人工定性描述的問題數據化。在模型上發現受破壞或腐蝕的部位,還可進行標註並導出,為針對性的修復提供依據。
相對於傳統航測,大疆精靈4 RTK 無人機大大降低了數據採集成本,並提供了高精度的影像位置信息,簡化了數據處理流程。另外,大疆智圖軟件的建模效果很驚艷,是一款優秀的三維實景建模軟件。軟硬件之間無縫銜接,形成了一套高效率、高精度的攝影測量解決方案。“
文物數位化已成趨勢
大疆精靈 Phantom 4 RTK 和大疆智圖組成的高精度、高效率、低成本、低門檻的航測解決方案,將大力推動文物古蹟的數位化進程,為保護文化遺產貢獻科技力量。
更多了解以及購買 DJI 大疆精靈 Phantom 4 RTK
下面這種在圓圓的地球上奔跑的視頻在抖音超火,點讚好幾十萬。拍攝其實很簡單,只需要一個 Insta360 ONE X全景相機就可以完成。
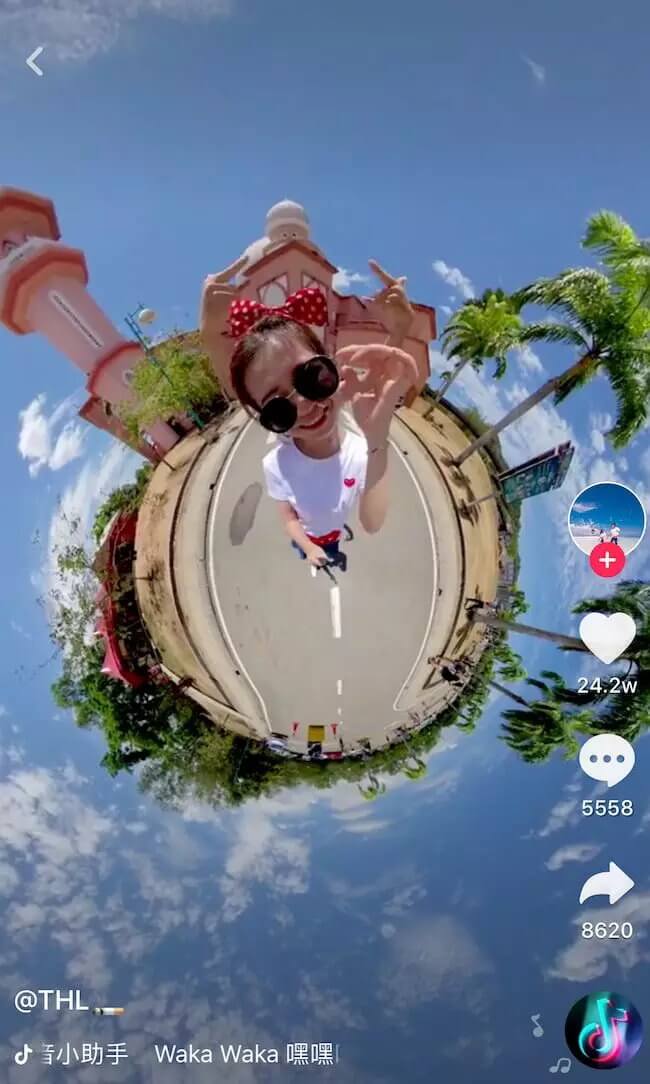
抖音24 萬贊小行星視頻(來自用戶@THL)
小王子同款星球怎麼拍,點開視頻一分鐘學會
▽
▽
用三腳架將相機固定,置於場地中央。點擊相機開始拍攝,以相機為中心畫圓走動。

拍攝完成後打開App ,選擇自由取景功能,調整到小行星模式。通過轉動手機來調整小行星的轉動,導出即可。
是不是很簡單?來欣賞其他同學的優秀作品
▽
(來自明星@BY趙曄)
(來自用戶@Shahaaim)
Enterprise DJI大疆行業應用

近幾年,作為新興的巡檢工具,無人機已憑藉其機動靈活、成本低、環境要求低、便於攜帶和運輸、可帶電作業、不受地形限制等諸多優勢,在輸電線路的日常巡檢與精細化巡檢作業中得到了廣泛應用。
在以往各類輸電線路的巡檢中,特高壓輸電線路的巡檢一直是一個“老大難“問題(特高壓是指1000 kV及以上交流電網或±800 kV及以上直流電網,如浙北-福州的1000 kV特高壓交流輸變電、昌吉-古泉的1100 kV特高壓直流輸變電)。電力線路電壓等級越高,在其附近作業的無人機受到的電磁干擾就越大,越容易發生地磁信號、遙控、圖傳信號丟失等現象。
那麼,無人機是如何克服強電磁干擾,實現高壓線路巡線的呢?這就不得不提我們今天的主角——RTK 定位技術。
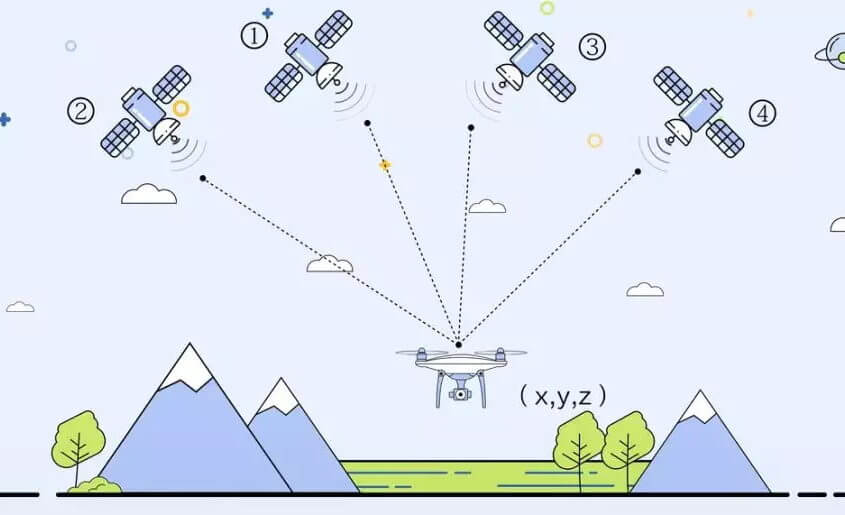
在認識RTK 定位技術之前,我們需要先了解衛星定位技術,又稱GNSS(GlobalNavigation Satellite System)技術。該技術通過測量出已知位置的衛星到用戶接收機之間的距離,綜合多顆衛星數據,從而運算出接收機的具體位置。因為需要計算三維位置及偏差,所以需要至少4 顆衛星。
GNSS 技術的優勢是:觀測時間短、提供三維坐標、操作簡便、全天候工作、功能多、成本低。
目前主流的GNSS 系統有北斗衛星導航系統(中國)、GPS(美國)、Glonass(俄羅斯)、Galileo(歐洲)等。但 GNSS 技術也有它的弊端,它可能因為各種原因產生定位誤差。

例如:衛星星載時鐘和接收機上的時鐘並不能始終保持同步,這就會造成時間上的偏差信號;如果在傳播過程中受到大氣層和各種障礙物的反射,信號傳播路徑就可能變長,造成測距誤差等。
這類定位誤差可達米級,甚至可能超過10 米。這樣的誤差,導致GNSS 系統無法滿足對定位精度要求高的行業及場景。
不過,聰明的科學家根據GNSS 定位技術的特點,研究出RTK 定位技術。
RTK是Real- time kinematic的縮寫,即實時動態,又稱載波相位差分技術。RTK是一種能夠提高GNSS系統定位精度的技術,它能夠將GNSS系統的定位誤差縮減到厘米級。
DJI 大疆創新將RTK 定位技術應用到無人機中,並推出D-RTK 技術。D-RTK 技術的應用使得無人機具有高精度的定位及抗磁干擾能力。

經緯M210 RTK V2 使用的D-RTK 使用頻點:GPS:L1/L2;GLONASS:L1/L2;BeiDou:B1/B2;Galileo:E1/E5。
首次定位時間:< 50 s,定位精度:垂直1.5 cm + 1 ppm(RMS);水平1 cm + 1 ppm(RMS)。
*1 ppm 是指飛行器每移動1 km 誤差增加1 mm。
當無人機進入變電站、鐵礦等強干擾的飛行區域時,即使無人機使用RTK 定位技術,強大的磁場依然會干擾無人機的電子羅盤,使其無法準確判斷航向,導致懸停位置發生偏移,增加飛行危險性。
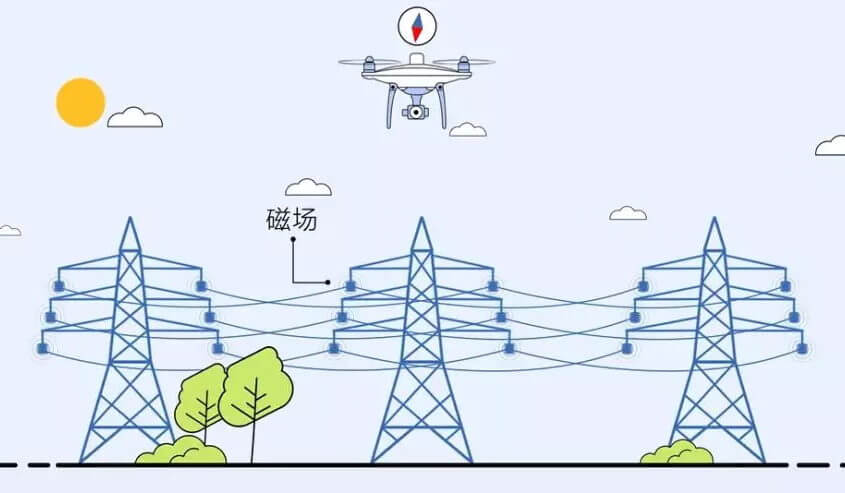
針對此種情況,DJI 大疆創新首創將雙天線測向技術應用到無人機RTK 定位技術上,創造性地推出了D-RTK 高精度導航定位技術。
原有的無人機RTK 定位技術只有一根天線,僅能獲得流動站與基準站的精準位置關係,無法提供準確的流動站航向信息。而雙天線測向技術在流動站一根天線的基礎上另外又增一根天線,流動站分別將兩路信號接收解算後,以其中一路接收天線的數據做基準,向另一路接收天線發送解算修正信息,完成天線2 跟天線1 的相對精准定位,從而獲得兩根天線之間的相對矢量。
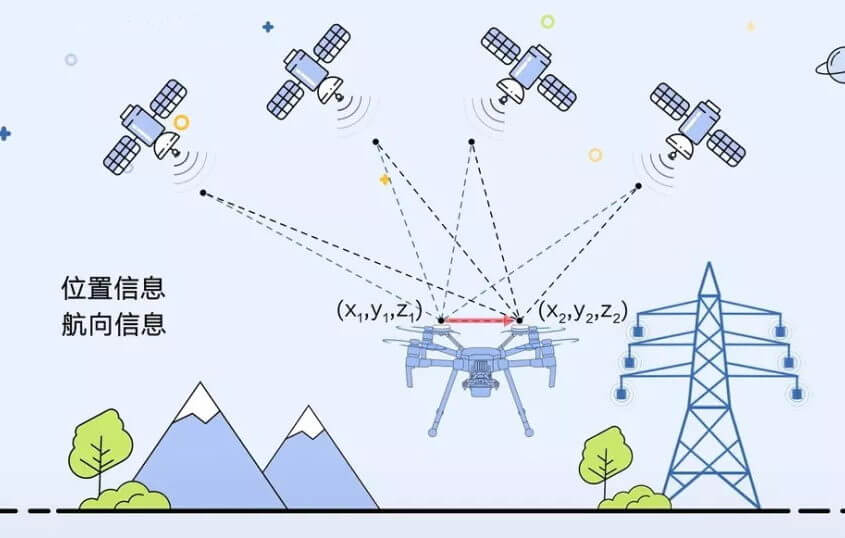
該矢量經過數據處理後可為無人機提供航向信息,使無人機獲得高精度的二維信息,即位置與航向信息。天線之間的相對距離越遠,定向精度越高。

D-RTK 技術在電力巡檢中的應用,為無人機帶來了更強大的抗磁干擾能力與精准定位能力,即使在特高壓輸電線路等磁場干擾較強的區域,也依然能靠近電力設施,在電子羅盤受擾後提供精準航向信息,保證定位精度,降低飛行風險、提高作業效率。
Insta360 EVO 可適配iOS 10及以上系統的iPhone X, iPhone XS, iPhone XS Max, iPhone XR, iPhone8/8 plus, iPhone 7/7 plus, iPhone 6s/6s plus, iPhone SE,iPad Pro,iPad (2018 )。
Insta360 EVO 安卓版最低配置要求:
1. SOC要求:驍龍6系列653以上,驍龍8系列820以上,麒麟950 及以上,Exynos 8890 以上
2. 系統要求:安卓5.1以上
3. 內存RAM:2GB以上
Insta360 EVO 安卓版經測試可適配機型(其他未經測試機型不代表無法兼容,建議參考最低配置要求):
為獲得良好的拍攝效果,選擇EVO兼容良好的SD卡至關重要。我們建議您僅通過官方授權經銷商購買品牌microSD 卡。下表所列各卡已知可與EVO良好兼容。
| SD卡 | 型號 | 內存 | 速度等級 |
|---|---|---|---|
*請使用UHS- I且速度達到V30 的exFAT 格式MicroSD 卡,速度過低可能導致無法正常錄像; Micro SD卡最大內存可支持128GB。*為獲得理想結果,我們建議您定期格式化microSD卡。
方法一:App自動連接
1.打開手機Wi-Fi和藍牙功能;
2.長按相機頂部圓形按鍵3秒,開啟相機;
3.打開App,進入相機拍攝頁,選擇“連接Wi-Fi”
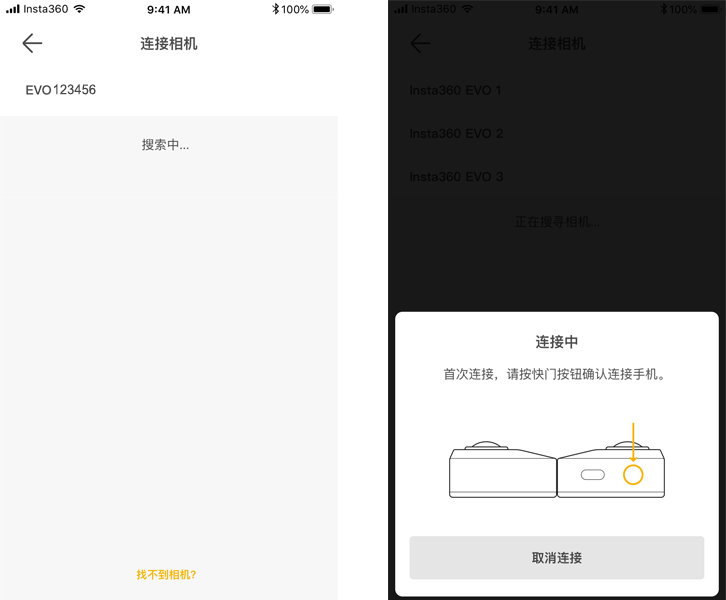
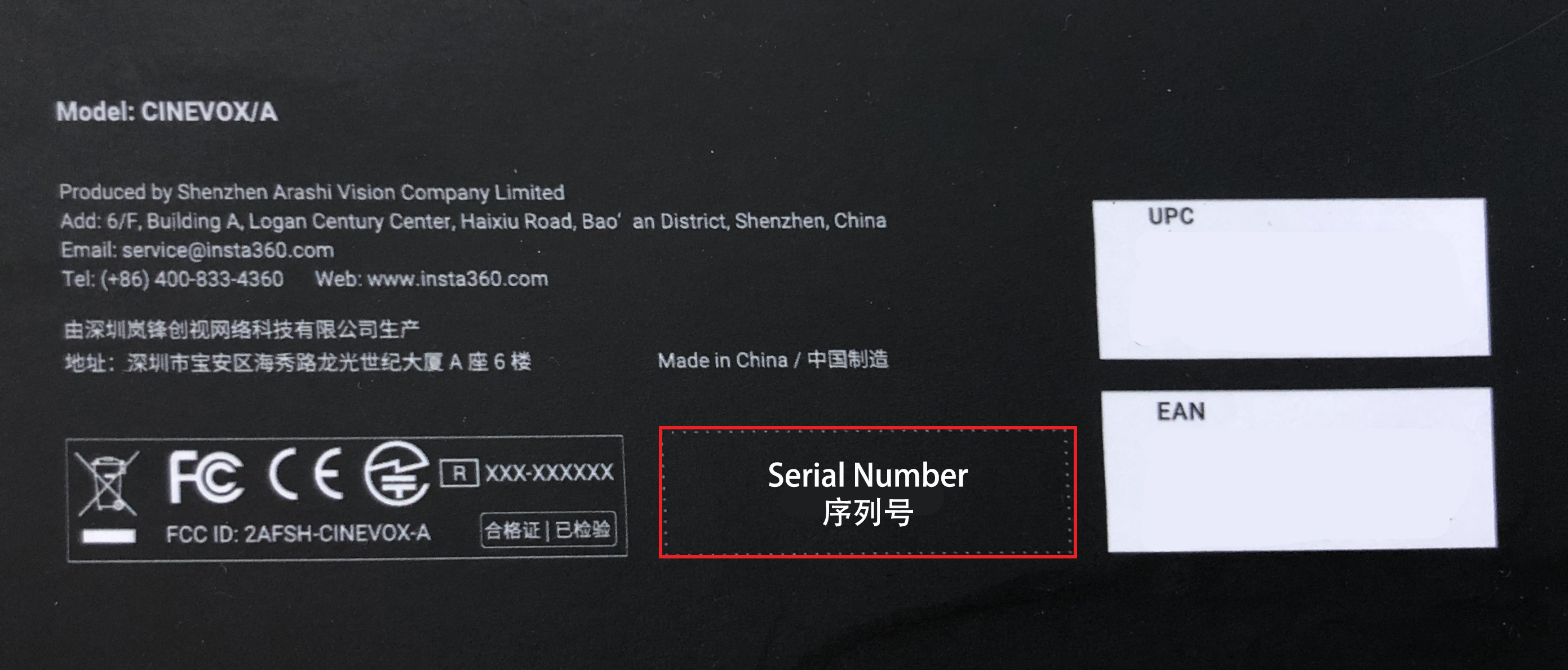
 4.當App頁面跳轉至提示【搜尋相機中……】,選擇你需要連接的相機(相機名稱默認為“EVO******“,******為相機序列號後6位,可在產品包裝盒上查看),然後按照App頁面提示完成操作。首次進行連接時,App會彈出連接確認提示,請單擊頂部圓形按鍵進行連接確認。
4.當App頁面跳轉至提示【搜尋相機中……】,選擇你需要連接的相機(相機名稱默認為“EVO******“,******為相機序列號後6位,可在產品包裝盒上查看),然後按照App頁面提示完成操作。首次進行連接時,App會彈出連接確認提示,請單擊頂部圓形按鍵進行連接確認。
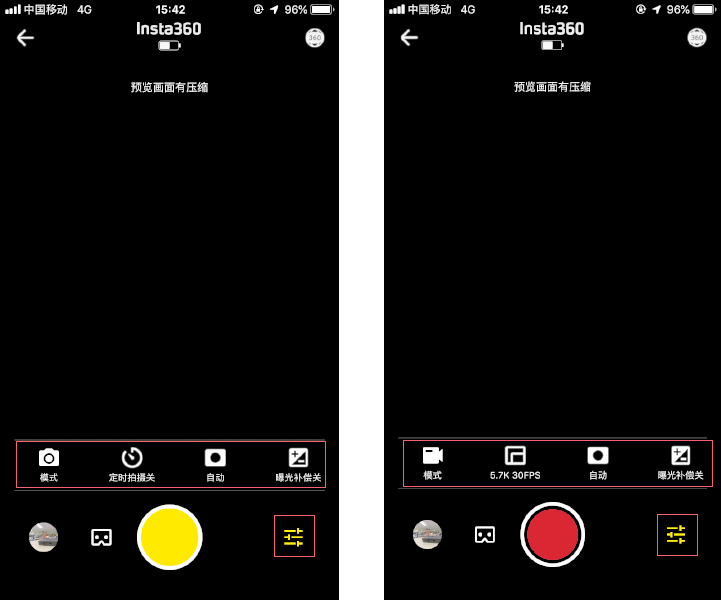
5.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作。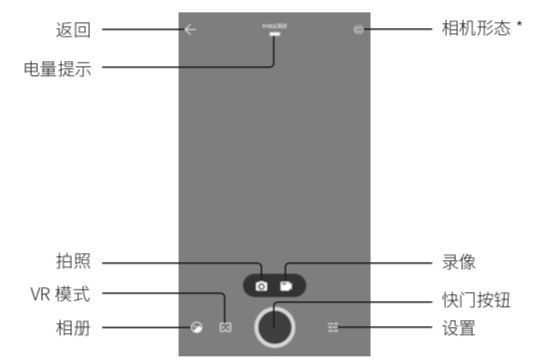
方法二:手動連接
1.打開手機Wi-Fi和藍牙功能,並長按相機頂部圓形按鍵3秒,開啟相機;
2.進入手機Wi-Fi設置頁,選擇你的相機Wi-Fi,並輸入密碼(密碼默認為12345678);
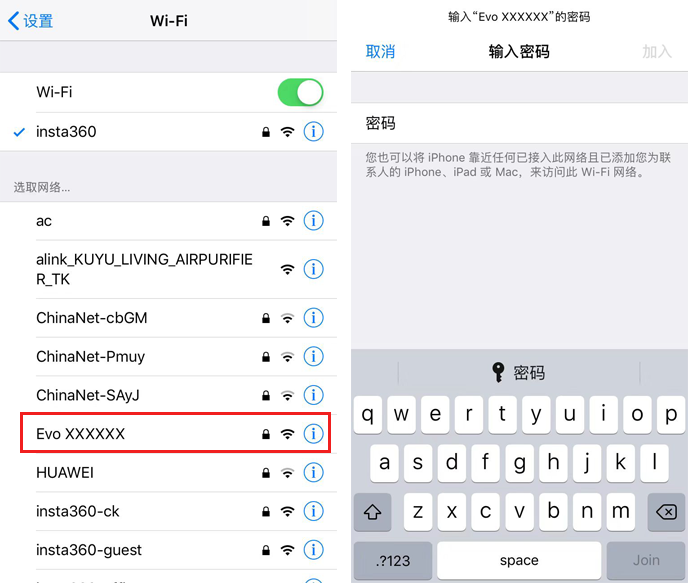 3.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作
3.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作
注意
1.相機無線傳輸的有效距離為10米(無干擾無遮擋);
2.相機在首次授權後,再次連接無需單擊電源鍵進行連接確認,App內點擊“連接Wi-Fi”即可自動連接至相機;
1. 可在產品包裝盒上查看。
 2.在手機與相機連接的狀態下,進入Evo App設置頁->關於Insta360,查看相機序列號
2.在手機與相機連接的狀態下,進入Evo App設置頁->關於Insta360,查看相機序列號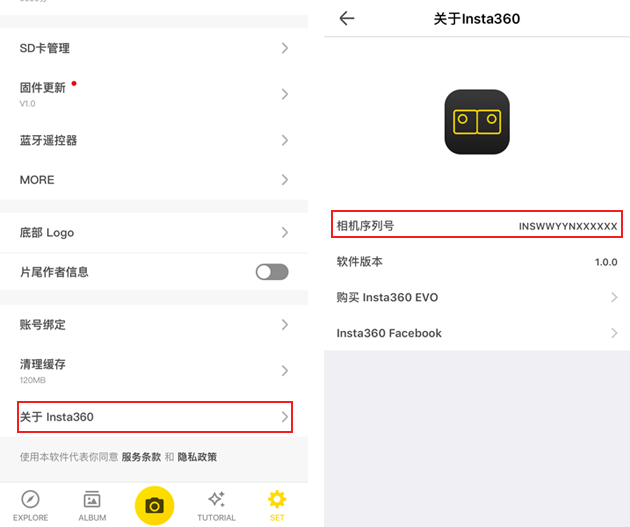
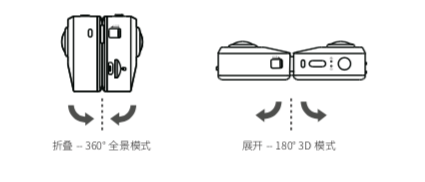
相機外觀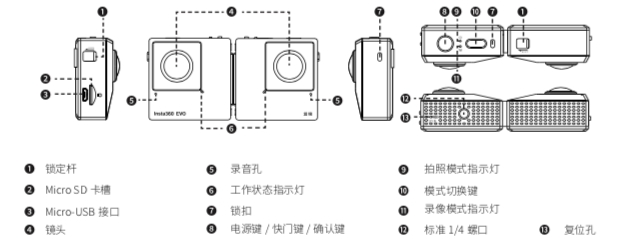
180°3D/360°全景模式切換
 使用前準備
使用前準備
| 相機狀態 | 工作狀態指示燈 |
|---|---|
獨立使用
開機+關機+復位
拍攝
注意:務必將鎖扣相對一側的鎖定桿推入鎖扣,確保在鎖扣鎖緊的情況下再進行拍攝。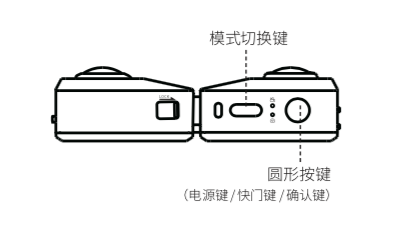
方法一:App自動連接
1.打開手機Wi-Fi和藍牙功能;
2.長按相機頂部圓形按鍵3秒,開啟相機;
3.打開App,進入相機拍攝頁,選擇“連接Wi-Fi”
4.當App頁面跳轉至提示【搜尋相機中……】,選擇你需要連接的相機(相機名稱默認為“EVO******“,******為相機序列號後6位,可在產品包裝盒上查看),然後按照App頁面提示完成操作。首次進行連接時,App會彈出連接確認提示,請單擊頂部圓形按鍵進行連接確認。
5.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作。
方法二:手動連接
1.打開手機Wi-Fi和藍牙功能,並長按相機頂部圓形按鍵3秒,開啟相機;
2.進入手機Wi-Fi設置頁,選擇你的相機Wi-Fi,並輸入密碼(密碼默認為12345678);
3.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作
注意
1.相機無線傳輸的有效距離為10米(無干擾無遮擋);
2.相機在首次授權後,再次連接無需單擊電源鍵進行連接確認,App內點擊“連接Wi-Fi”即可自動連接至相機;
 3.升級完成後,將彈出固件升級成功提示。
3.升級完成後,將彈出固件升級成功提示。1.首先請在Insta360官網下載最新的固件安裝包;
2. 插入內存卡到EVO,並且通過USB連接到電腦,開啟EVO,等相機指示燈為藍燈閃爍,此時電腦能直接訪問內存卡內文件;
3. 請將最新下載的“InstaEvoFW.bin” 升級文件拷貝到SD卡根目錄(請注意將舊的bin文件刪除,保持解壓後的固件文件名不要被修改,否則係統將無法自動識別固件,不能正常升級);
4. 將相機與電腦斷開連接,相機自動關機。再次長按EVO相機頂部圓形鍵啟動相機,相機檢測到升級文件將自動升級。升級過程中會相機會自動重啟。
5.將相機與手機連接,打開Insta360 EVO App,點擊設置—>點擊關於Insta360,查看相機固件是否為最新版本;(相機啟動時,顯示屏也會顯示當前固件版本)
6. 如昇級過程中遇到無法升級的情況,可先通過電腦對內存卡進行格式化操作(格式化為exFAT格式),然後再進行嘗試;
7. 如有其他問題可隨時聯繫售後客服人員。
 2.將相機放在水平面上,根據系統提示進行操作即可。
2.將相機放在水平面上,根據系統提示進行操作即可。 2.將相機放平,根據系統提示進行操作即可。
2.將相機放平,根據系統提示進行操作即可。 方法二:通過電腦格式化Windows電腦
方法二:通過電腦格式化Windows電腦1. 將內存卡插入相機,長按相機頂部圓形按鍵打開相機;
2.使用隨機附贈的USB連接線與電腦進行連接;
3. 在電腦中點擊“我的電腦”—>右鍵點擊“U盤”—>點擊“格式化”
 4. 文件系統選擇“exFAT”,分配單元大小選擇’128KB’,點擊開始即可。
4. 文件系統選擇“exFAT”,分配單元大小選擇’128KB’,點擊開始即可。
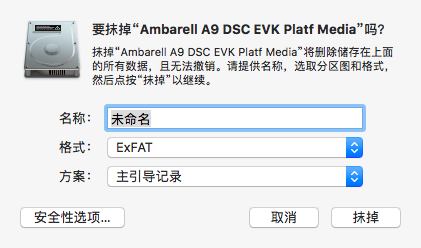
 Mac電腦
Mac電腦
1. 將內存卡插入相機,長按電源鍵開啟相機;
2.使用隨機附贈的USB連接線與電腦進行連接;
3. 在電腦中打開“磁盤工具”程序—>選中“Ambarell A9 DSC EVK Platf Media”—>點擊“抹掉”;
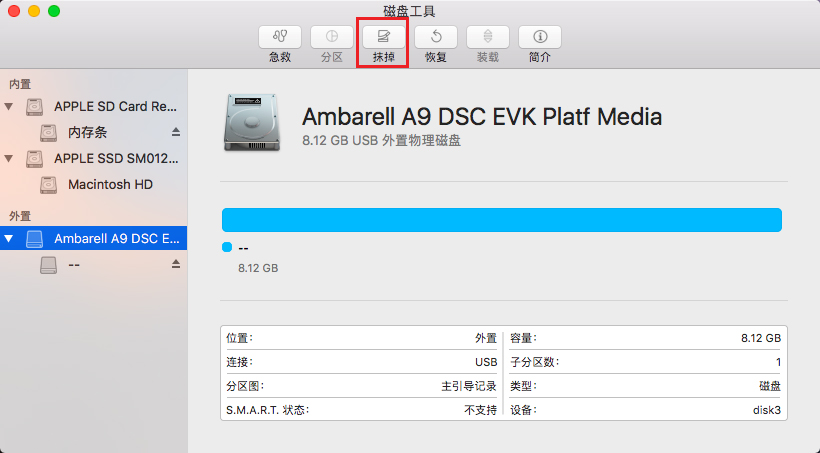 4. 格式選擇“ExFAT”,點擊抹掉即可。
4. 格式選擇“ExFAT”,點擊抹掉即可。
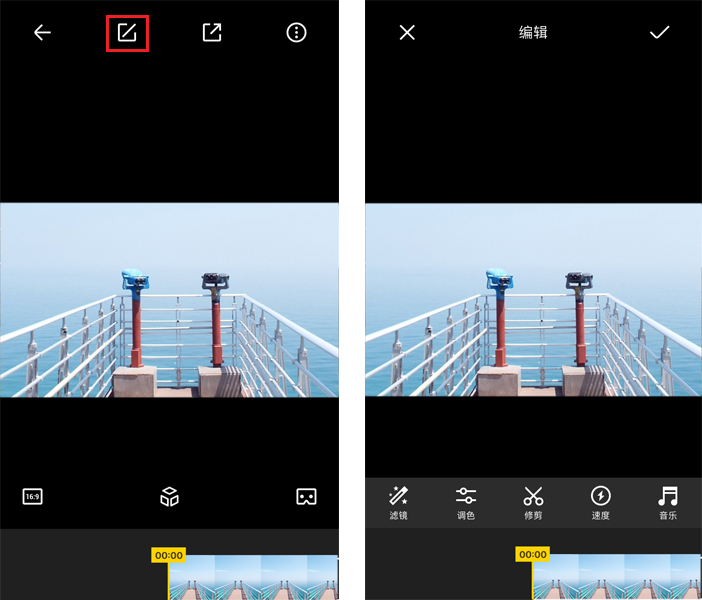 3.編輯完成,點擊右上方“✓“保存操作。
3.編輯完成,點擊右上方“✓“保存操作。
方法一:App自動連接
1.打開手機Wi-Fi和藍牙功能;
2.長按相機頂部圓形按鍵3秒,開啟相機;
3.打開App,進入相機拍攝頁,選擇“連接Wi-Fi”
4.當App頁面跳轉至提示【搜尋相機中……】,選擇你需要連接的相機(相機名稱默認為“EVO******“,******為相機序列號後6位,可在產品包裝盒上查看),然後按照App頁面提示完成操作。首次進行連接時,App會彈出連接確認提示,請單擊頂部圓形按鍵進行連接確認。
5.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作。
方法二:手動連接
1.打開手機Wi-Fi和藍牙功能,並長按相機頂部圓形按鍵3秒,開啟相機;
2.進入手機Wi-Fi設置頁,選擇你的相機Wi-Fi,並輸入密碼(密碼默認為12345678);
3.連接成功後,即可進入App拍攝頁,點擊快門按鈕,進行拍照、錄像等操作
注意
1.相機無線傳輸的有效距離為10米(無干擾無遮擋);
2.相機在首次授權後,再次連接無需單擊電源鍵進行連接確認,App內點擊“連接Wi-Fi”即可自動連接至相機;

{kind=link}