描述

DJI 禪思 Zenmuse L3 長測程高精準度測繪雷射雷達系統
DJI新一代機載高精度航測雷射雷達系統,配備長測程雷射雷達,在 10% 的反射率下,最高測程可達 950 米[1]。結合雙一億像素可見光相機及高精度位姿系統,禪思 L3 帶來更高效的三維數據獲取,單日作業面積可達 100 平方公里[2]。

1535 奈米長測程雷射雷達
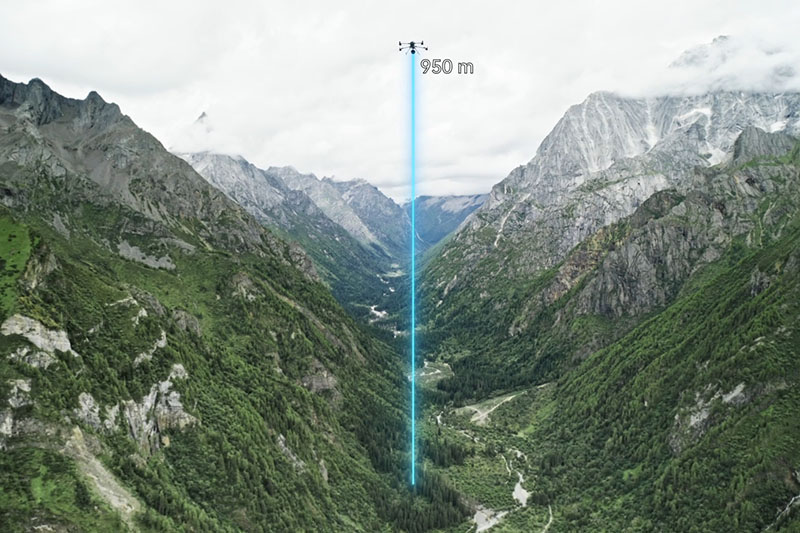
遠測程,廣覆蓋
在點頻 100 kHz、環境光強 100 klx 的條件下,面對 10% 反射率目標,測程高達 950 米[1]。點頻靈活可調,能夠更好地匹配發射功率與作業模式。典型作業航高為 300 米至 500 米,顯著擴大單次作業覆蓋面積,有效提升測繪效率。
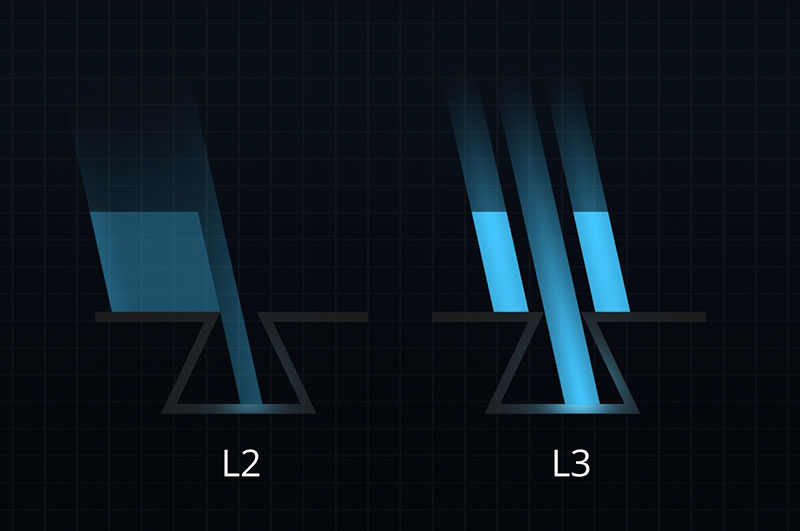
小光斑,大能量
雷射發散角僅為 0.25 mrad(1/e²),同距離下光斑大小約為Zenmuse L2 的五分之一,能分辨更細小的目標物,如電線、樹枝等。同時也帶來更強的穿透能力,能夠大幅提高林下地面點的獲取數量,實現對複雜地形和結構的高精度還原。

高點頻,多回波
大雷射脈衝發射頻率可達 200 萬點/秒,最多支持 16 回波[3],能夠精準還原地物的空間資訊。可根據不同作業場景調整點雲密度和穿透能力,滿足高精度測繪或複雜環境下的多樣需求。
三種掃描模式
支援一字形重複掃描、米字形重複掃描和非重複掃描三種模式,靈活適配不同作業場景:
- 一字形重複掃描:點雲分佈更均勻,可滿足高精度地形測繪需求;
- 米字形重複掃描:兼顧精度與多發射角度,穿透性強,適用於林地或建築物密集場景;
- 非重複掃描:具備多發射角度,覆蓋範圍更廣,適用於電力巡檢等複雜結構場景。

雙一億像素可見光相機系統
- 雙一億像素可見光相機
配備雙一億像素 4/3 CMOS 可見光感光元件,採用機械快門,大幅提升作業精準度與效率。支援像素合成至 2500 萬像素,單像元尺寸更大,帶來更強的感光能力及更優異的賦色效果。 - 107°寬畫幅
採用雙可見光測繪相機,橫向視場角提升至 107°,單次採集能夠覆蓋更廣區域。僅需 20% 雷射旁向重疊率,即可一次性完成數位正射影像圖(DOM)和數位高程模型(DEM)的數據採集,有效提升作業效率。
高精準度與高穿透性
自研高精準度系統
升級的高精準度位姿系統實現了航向精準度 0.02°、俯仰/橫滾精準度 0.01°(後處理,1σ),自研雷射雷達實現了 150 公尺下 5 公釐的重複測距精準度(1σ)[5],並支援微秒級時間同步。出廠前經過嚴格的內參檢校,有效保障成果精準度。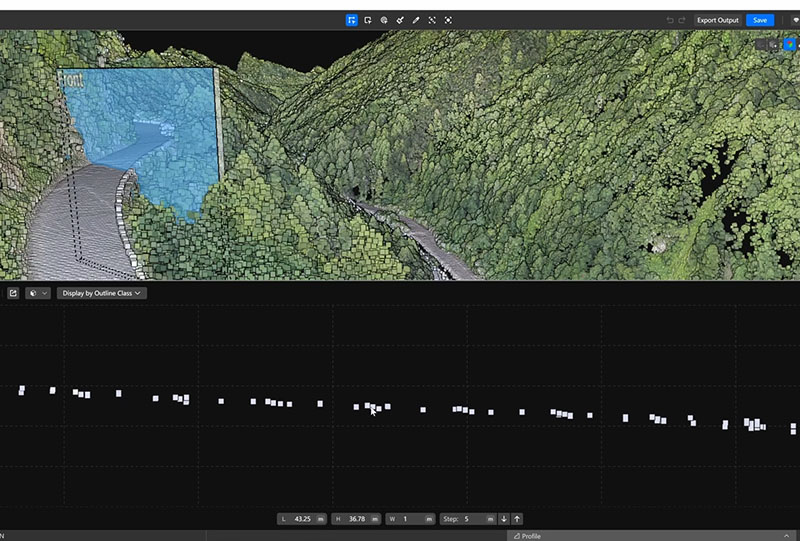
雷射成果精準度
在 120 公尺航高下的高程精準度優於 3 公分,300 公尺下優於 5 公分,500 公尺下優於 10 公分[6],無論是 1:500、1:1000 還是 1:2000 等典型測繪專案,均能高效勝任。Zenmuse L3 生成的點雲厚度僅為 Zenmuse L2 的一半,滿足高精準度分析和應用需求。
可見光成果精準度
配備雙一億像素可見光相機,即使在 300 公尺作業高度下,地面取樣距離(GSD)仍可達到 3 公分[7]。系統支援位置即時同步,實現免像控作業,保障高精準度測繪的影像數據品質。
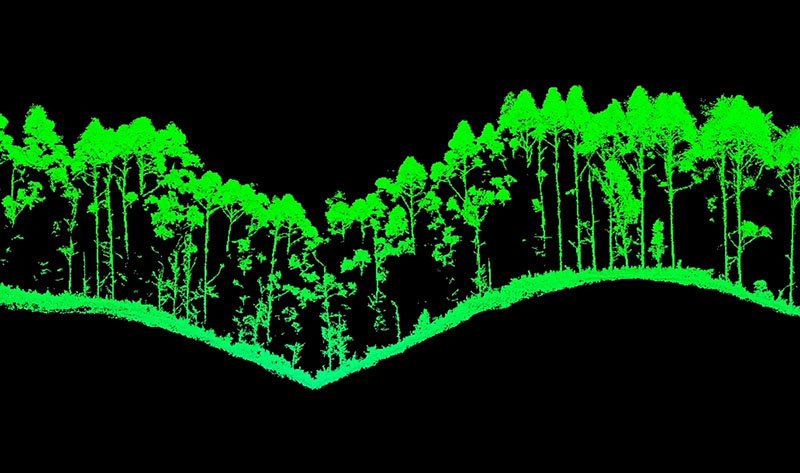
高地面點密度
採用更小光斑設計,單點能量更大,具備更強的穿透能力。在地形測繪等應用場景下,能夠獲取更多且更完整的地面點,有效提升地形數據的精準度與完整性,實現對地表的精準擬合和還原。
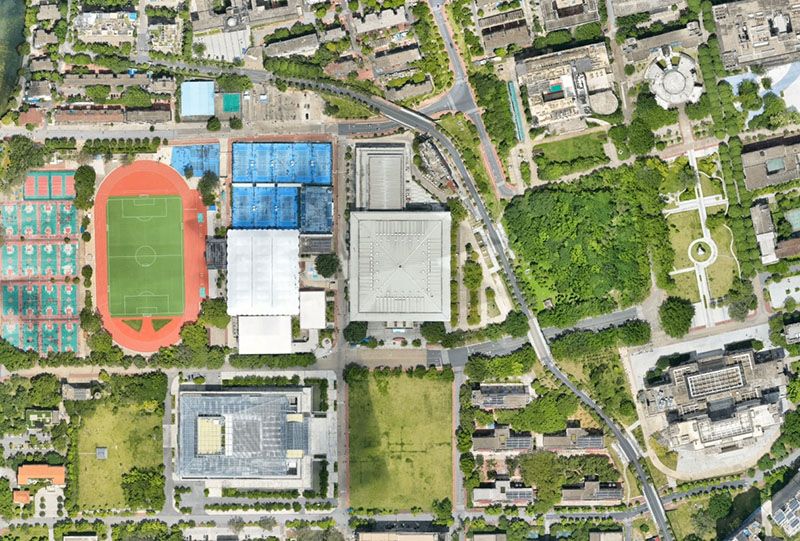
高效率
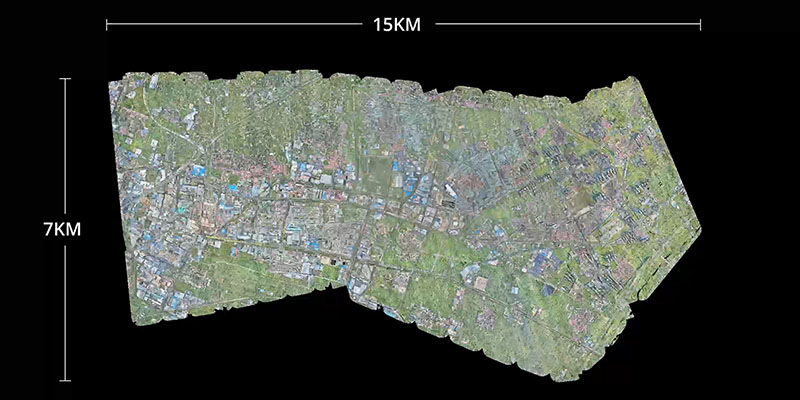
單日100 平方公里[2]
Zenmuse L3 結合 DJI Matrice 400,在 300 公尺典型航高作業場景下,單架次可覆蓋 10 平方公里,單日作業面積可達 100 平方公里[2],顯著提升作業效率。
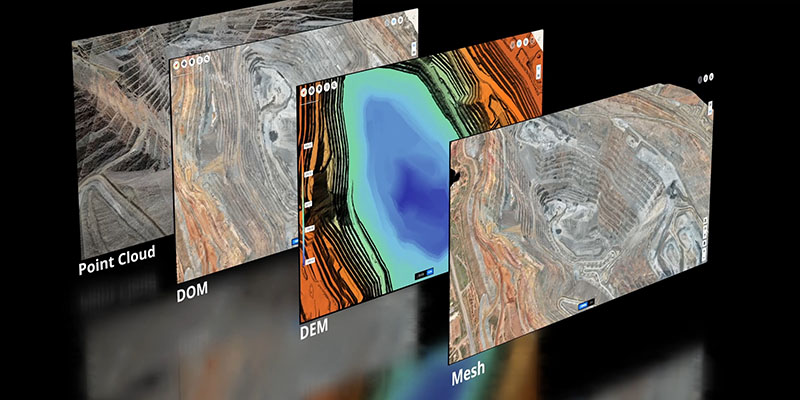
一次作業,多種成果
可同時採集雷射及可見光數據,一次飛行作業即可同時獲取 DEM、DOM 等多種測繪成果。

高效率全流程解決方案
依託 DJI 自有生態,提供從資料採集、處理到應用的一站式全流程解決方案。相比傳統多平台操作流程,DJI 全流程解決方案操作簡便、易於上手,助力使用者高效完成各類測繪任務。
資料採集
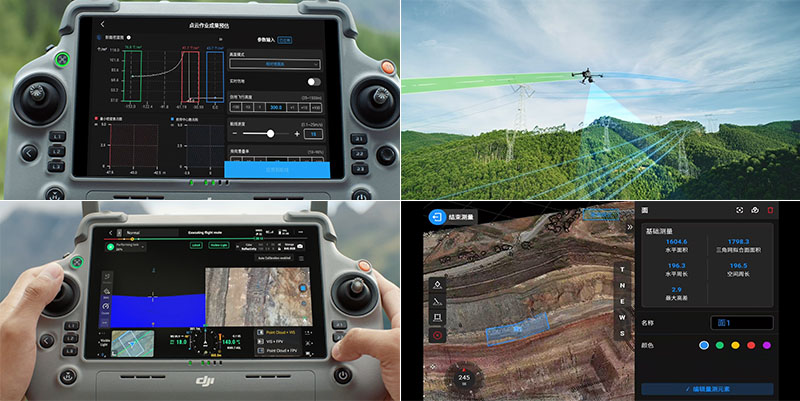
- 點雲成果預估
DJI Pilot 2 可依照使用者的航線設定自動推薦作業規格,於起飛前即可產生剖面密度圖與點雲分布圖,便於使用者預估點雲成果。 - 仿線飛行
Zenmuse L3 顯著提升了仿線飛行能力,最高支援 130 公尺仿線作業,大部分場景下無需繞行交跨,即可一次性獲取完整的電力通道數據,實現高效直線飛行。 - 多維資訊分螢幕顯示
DJI Pilot 2 支援分螢幕顯示,使用者可靈活選擇點雲與可見光、可見光與輔助影像、點雲與輔助影像等多種分屏組合。當仿線作業或可見光相機朝下時,輔助影像會即時呈現飛行方向畫面,有效規避飛行風險,提升整體效率與安全保障。 - 即時點雲
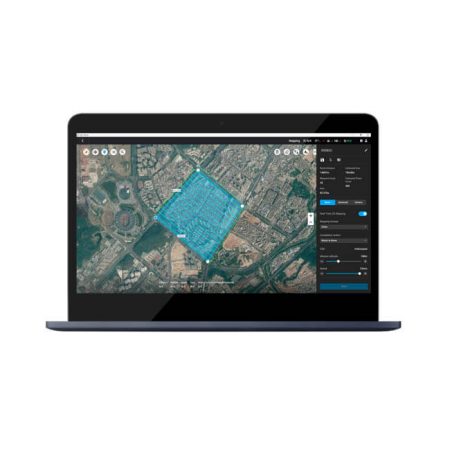
支援即時點雲 SLAM 重建,作業過程中可實現點雲資料的二維及三維即時預覽,直覺掌握作業進度並快速量測。還支援透過 DJI FlightHub 2 將點雲成果即時同步至雲端,滿足應急場景下的快速研判需求。 - 雲端點雲測量
Zenmuse L3 點雲成果全面相容 DJI FlightHub 2 雲平台。使用者可在雲端即時查看和管理點雲資訊,便捷實現精細化航線生成、興趣點標記與分享、模型線/面測量等多項功能。

資料處理
- PPK 資料解算
DJI Terra 內建強大的 PPK 解算能力,相容 D-RTK 3 及標準格式基站數據。支援可見光與雷射雷達的本地 PPK,確保在網路條件受限或無法進行 RTK 作業時,依然能夠提供公分級高精準度定位結果。 - 雷射高斯潑濺重建
Zenmuse L3 在 DJI Terra 平台上首次實現了點雲與可見光資料的高斯潑濺融合重建,大幅提升模型的真實感和細節表現,也進一步拓寬了雷射雷達在泛測繪等多元場景下的應用範圍,為使用者帶來更高品質的三維模型成果。 - 融合重建
DJI Terra 支援雷射雷達與可見光資料的深度融合,透過 Zenmuse 雷射雷達一次採集,可同時匯出高精準度的點雲、二維地圖和三維網格模型。針對橋梁、變電站等細小結構豐富的場景,融合重建提升了模型的完整度和細節表現,滿足電力、交通、基礎設施等多行業需求。

資料應用
- 智慧分類
DJI Modify 支援點雲多語義智慧分類,自動區分地面、植被、建築、電線、電塔等多種地物類型。分類後,使用者可透過快速選擇和結構選擇工具,高效調整地物類別,實現點雲的精細調整與優化,提升分類準確性和處理效率。
- 剖面工具
DJI Modify 的剖面工具能讓使用者靈活選取點雲模型的剖切區域,直覺分析地形起伏、地物結構、斷面高程等空間特徵,便於進行地形分析、工程設計、斷面測量等多種應用。 - 多類型成果應用
Zenmuse L3 結合 DJI Modify 平台,具備強大的多類型成果輸出能力。可基於點雲數據自動生成語義點雲、DEM、TIN、點網格及等高線等多種測繪成果,並支援多成果的疊加顯示,豐富的成果類型滿足下游應用的多樣化需求。

資料安全
Zenmuse L3 支援 CFexpress™ 記憶卡加密功能,可實現對儲存媒介的加密保護,有效防止資料被非法讀取或竊取。此外,DJI Matrice 400 也支援一鍵清除 log 日誌和影像傳輸 AES-256 加密技術,進一步保障資訊的保密性。

應用場景
配合 DJI 的軟硬體生態,Zenmuse L3 可被應用於勘查、測繪、電力、林業、工程等作業場景。
註解
[1](1-1)測程定義:50% 的發射脈衝能被探測到的距離。若一束雷射光束擊中不止一個目標,雷射脈衝能量會分散,測距可能縮短。
(1-2) 測試條件:100 klx 背景光,視場角中心區域,大氣能見度為 23 公里,平面靶標目標,其尺寸大於雷射光束直徑,雷射入射方向垂直於靶標平面。
[2]Zenmuse L3 搭配 DJI Matrice 400 使用時,單日作業面積可達 100 平方公里(平原地形 300 公尺正射航高、20% 旁向重疊率、17 公尺/秒飛行速度、有效航時 6 小時)。
[3]實際可作業高度請參照當地法律法規。各國家/地區的限飛高度有所不同,請聯繫當地相關單位以了解實際限高。
[4]僅在雷射脈衝發射頻率為 100 kHz 或 350 kHz 時支援 16 回波。
[5]在環境溫度為 25℃、目標物體反射率為 80% 的條件下,於 150 公尺外測得。具體數值與測試條件相關,僅供參考,請以實際測量結果為準。
[6]於 DJI 實驗場地及以下條件下測得:
(6-1)選擇地物稜角特徵明顯場地,DJI Matrice 400 連接經過位置標定的 D-RTK 3。使用 DJI Pilot 2 的面狀航線,採用一字形重複掃描,飛行速度 15 公尺/秒,雲台俯仰為 -90°,開啟航向標定。航線中每個直線段不超過 3300 公尺。
(6-2)檢查點符合漫反射模型的裸露硬質材料。
(6-3)使用 DJI Terra 執行後期處理,處理時開啟點雲精準度最佳化。
[7]詳細計算方法請參見 DJI Zenmuse L3 官網下載頁面的使用者手冊。
[8]不同國家 / 地區所贈送的加值服務產品可能存在差異,詳情請諮詢當地代理商;免費維修:在保障範圍及保額內,享免費維修服務;保額共享:在同一時間段(30 個自然日)內首次啟用關聯 DJI Care 行業無憂旗艦版的 DJI 行業應用產品可疊加保額進行共享;雙向免運費:僅限 DJI Care 行業無憂服務區域內使用,超出服務地區所產生的物流、關稅等費用需由使用者自行承擔;具體保障部件請以 DJI 官網 – 服務與支援 – 售後服務政策展示為準。
*本商品頁所列出的各項參數數值,在不同的外部環境、使用方式、韌體版本、長期使用損耗下,可能會有不同程度的差異,請以實際體驗為準。