最新消息
“遙控+遙控”,你的Mavic 2 “御”2現已支持雙控模式!

* 請先將飛行器固件、帶屏遙控器固件和 DJI GO 4 APP 一併升級至最新版本。
飛行器最新版本為V01.00.40.00,帶屏控最新版本為 V01.00.0530, APP版本為V4.3.16。
雙控模式有什麼用?

怎樣連接兩台遙控?

* 連接雙遙控器時,需通過“遙控器菜單”中的“遙控器對頻”進行操作,無法用其他對頻方式連接。
雙控操作須知


主遙控器 輔遙控器


主遙控器
輔遙控器
現在,
你準備好用兩台遙控器來控制一架飛機了嗎?

新增多種作業類型,精靈Phantom 4 RTK 固件升級-2019/05/07

精靈Phantom 4 RTK 是一款小型多旋翼高精度航測無人機,面向低空攝影測量應用,具備厘米級導航定位系統和高性能成像系統,便攜易用,在測繪、巡檢等多個領域發揮了重要作用,能夠全面提升行業作業效率。
升級內容
- 新增攝影測量 3D(五向飛行)作業類型,規劃作業區域後生成的航線包含一組正射航線和四組傾斜航線。
- 新增仿地飛行作業類型。在 microSD 卡根目錄的 DJI\DSM 路徑下創建文件夾,並存儲 tif 和 tfw 文件,然後導入 App 。在導入文件所對應的區域規劃航線後,可進行仿地飛行。
- 新增智能飛行電池電量異常檢測提示。若出現異常,App 會有相應提示,並觸發返航。
- 優化航帶飛行的航線規劃方案。在設置中開啟或關閉“航線包含中心線”選項,可設置生成的航線是否包含規劃時添加的中心線。
- 修復任務列表加載慢的問題。
- 修復返航過程中偶現的相機預覽畫面抖動的問題。
- 修復網絡 RTK 套餐 B 段無法激活的問題。
- 解決T16、MG-1P、精靈 Phantom 4 RTK 遙控器固件不兼容的問題。
友情提示:請認准版本號!
遙控器固件版本需要升級至 V 02.01.0009。
如何升級
通過DJI Assistant 2 for Phantom 或DJI Assistant 2 for MG 升級
① 複製鏈接下載安裝包:
https://dl.djicdn.com/downloads/dji_assistant/20190315phantom/DJI+Assistant+2+For+Phantom+2.0.7.exe
② 將飛行器/遙控器連接至電腦;
③打開DJI Assista nt 2 for Phant om;
④ 將飛行器固件升級至 V 02.01.0009,遙控器固件升級至 V 02.01.0009。
– 下載並安裝 DJI Assistant 2 for MG:
① 複製鏈接下載安裝包:
https://dl.djicdn.com/downloads/dji_assistant/20190319/DJI+Assistant+2+For+MG+2.0.13.exe;
② 將飛行器/遙控器連接至電腦;
③ 打開DJI Assistant 2 for MG;
④ 將飛行器固件升級至V 02.01.0009,遙控器固件升級至V 02.01.0009。
通過APP 升級
① 打開遙控器與飛行器,點擊遙控器屏幕右下角固件升級圖標;
② 找到本次升級的版本,點擊升級後開始下載;
③ 下載完成後再次點擊升級,安裝更新;
④ 更新完成後,系統會提示已升級至最新版本。
* 遙控器在更新過程中可能會重啟。
-飛行器固件升級
① 使用 USB-C OTG 線和 Micro-USB 線連接遙控器和飛行器;
② 在遙控器上找到需要升級的版本,點擊對應版本右側的升級按鈕;
③ 點擊安裝更新,飛行器在升級得過程中可能重啟。
* 升級過程中切勿斷開連接。
通過SD卡升級(僅支持遙控器固件升級)
① 通過鏈接下載文件:
https://docs.djicdn.com/Agriculture/firmware/ag410_v02.01.0009.bin;
②將文件(AG410_v02.01.0009.bin)拷貝至microSD卡根目錄;
③ 將 microSD 卡插入遙控器的microSD 卡槽;
④ 開啟遙控器電源,約 10 秒後,界面提示檢測到固件包,根據提示進行操作並等待升級完成。
* 升級完成後,請取出 microSD 卡,並刪除其中的固件文件,否則每次插卡後開啟遙控器時均會提示檢測到固件包。
- 此固件包含智能飛行電池固件。如果擁有多塊電池,請重複升級流程,為所有電池進行升級。
- 網絡RTK用戶務必進行此次固件升級,否則可能無法繼續使用網絡RTK套餐。
- 此次固件升級可能耗時較久,請耐心等待。升級過程中切勿關閉飛行器電源。
- 遙控器固件升級後將無法降級。
- 務必確保飛行器及遙控器固件均為最新版本,否則將影響使用。

Jabra售後維修訊息公告

由於Jabra原廠政策變更,Jabra消費型商品將統一由原廠委託之服務中心承接維修服務。
自2019/08/22起,Jabra維修客服請洽Jabra 售後服務中心
- 服務電郵: jabrasupport@en-sonic.com.tw
- 公司電話: 02-2704-3883
- 客服專線: 0901272388
24h洛杉磯之旅,Vlog影視颶風拍了什麼?
Insta360
第一次坐直升機
在洛杉磯的海灘看金色的夕陽
知名Vlog 影視颶風Tim
帶著 Insta360 ONE X 拍下了在洛杉磯的一天
美國西海岸究竟有多美?
跟著Tim 的鏡頭一起看看
▽
為什麼Tim 帶了全景相機去旅行?
因為旅途中的美好事物總是很短暫
第一次坐直升機、跳傘、潛水…
可能沒等反應過來就結束了
然而,如果你有一台全景相機
“ 就可以把身邊所有事情給抓下來
說白了就是可以重新回到這個時間點”
Tim 360° 拍下了第一次坐直升機的視頻
比如在聖莫妮卡海灘
最美的夕陽,時間卻很短
這個時候如果用全景相機
就能同時捕捉海灘美景、自己身影
還有天上瞬間飛過的鳥
▽
那些轉瞬即逝的事物,都能被360° 拍下來
那為什麼要帶Insta360 全景相機去旅行?
原 因 很 多
▽
搭載FlowState超級防抖
任何手抖的小白都能隨便拍出超平穩視頻
以往只有專業攝影師才能拍出的
斗轉星移、移動延時大片效果
每個攝影小白拿著ONE X
邊走邊拍就能拍出來
▽
一鍵切換成小行星視角
好玩新奇,脫穎而出
旅行出遊、假日旅拍
你需要一台Insta360 ONE X
點擊“ 此處”,立即入手
{kind=link}
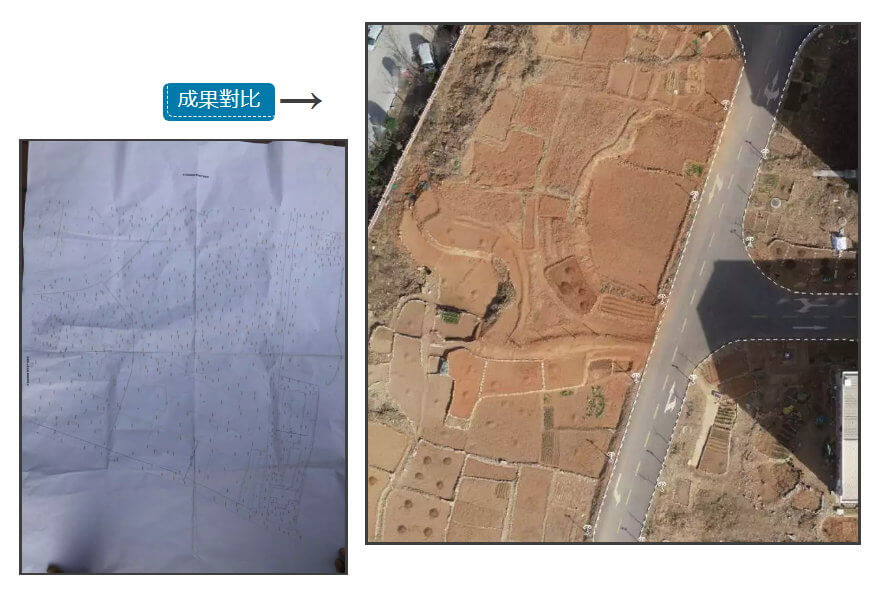
大疆航測解決方案輔助高校工程建設
原創: Enterprise DJI大疆行業應用

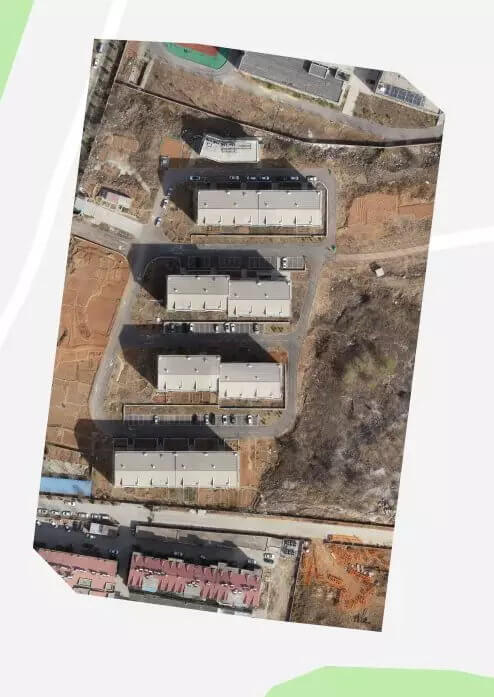
工程概況

作業流程
作業設備
航線規劃與飛行設置
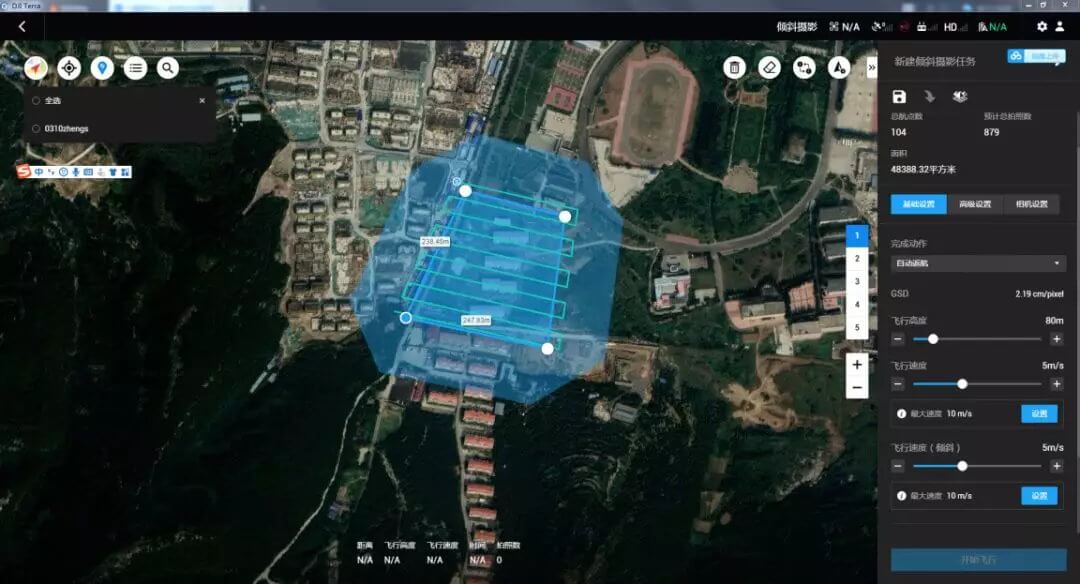
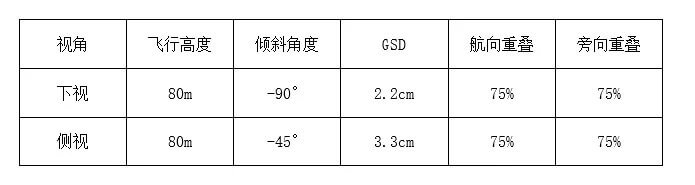
精靈Phantom 4 RTK支持斷點航飛,更換電池後,無人機可從上次斷點位置繼續拍照,無漏拍、多拍照片等現象發生。精靈Phantom 4 RTK連接網絡RTK實時定位,將獲取POS信息保留在照片EXIF文件內。
自動正射鑲嵌與傾斜三維實景建模

DLG 數據採集
精度驗證
>
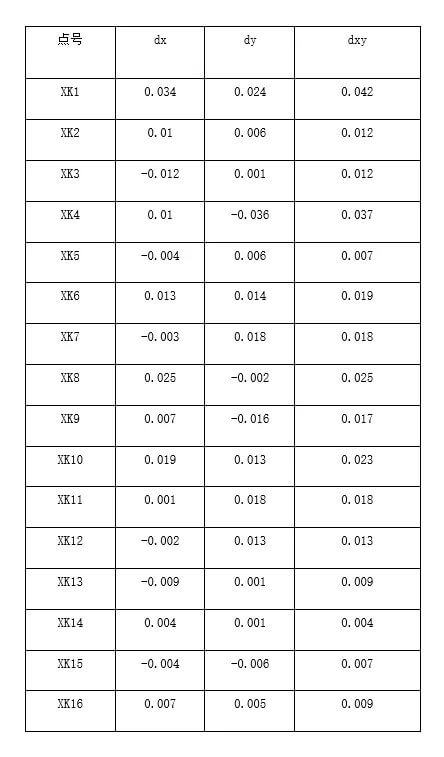
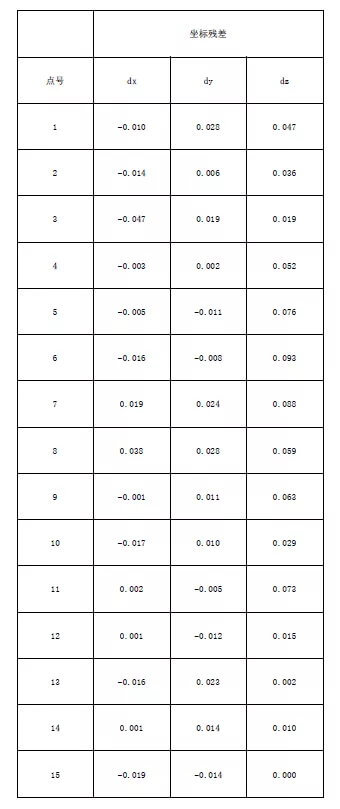
實測證明,精靈Phantom 4 RTK 無人機的航測精度非常高:二維正射影像中,水平最大殘差為3.4 cm,中誤差為1.243 cm;垂直最大誤差為3.6 cm,中誤差為1.47 cm。三維模型中,水平最大誤差為4.7 cm,水平中誤差為1.891 cm;垂直最大誤差為2.8 cm,垂直中誤差為1.502 cm;高程最大誤差為9.3 cm,高程中誤差為3.102 cm,符合測量精度要求。
總結

為滿足竣工規劃核實的行政時限需求,更快更及時地交付規劃核實報告,大幅減少外業測量和內業質量審查時間,引進無人機進行傾斜建模已成為優選方案之一。
更多了解以及購買 DJI 大疆精靈 Phantom 4 RTK
無人機告訴你,如何用航測“重建”古建築?
在歷史的長流裡
「文物」與「古建築」
承載著人類文明的發展
但隨著時代的變遷這些“寶藏”
也經歷著風吹雨打與人為損壞
在久經磨難後它們如何被修繕重建?
而對於古建築的保護又有什麼更有效的方式呢?
DJI大疆行業應用給出了專業的答案

今年3月,DJI大疆行業應用與武漢大學張祖勳院士團隊合作,為山西大同懸空寺建立高精度實景三維模型,為文物古蹟數字化提供技術支持,進而推動文物的研究、分析及保護。
– 懸空寺簡介 –
懸空寺位於山西省大同市渾源縣恆山金龍峽西側翠屏峰的峭壁間,以如臨深淵的險峻而著稱。其原名為“玄空閣”,“玄”取自於中國傳統宗教道教教理,“空”則來源於佛教的教理,後因整座寺院就像懸掛在懸崖之上而改名為“懸空寺” 。金庸先生稱其:“於松不能生,猿不能攀之處,發偌大願力,憑空建寺”。2010 年,懸空寺入選《時代周刊》世界岌岌可危十大建築。
點擊觀看懸空寺三維模型
影像採集的挑戰

傳統的近景攝影測量方式一般是人工手持或者安裝腳架進行拍攝、測量,這樣具有極大的作業風險,並且無法拍攝到高空的立面場景。如果採用固定翼航測方式,險峻的峭壁環境無法為固定翼飛機提供足夠的起降空間;即便從遠處起飛,固定翼飛機因無法懸停,同樣難以採集到立面影像。
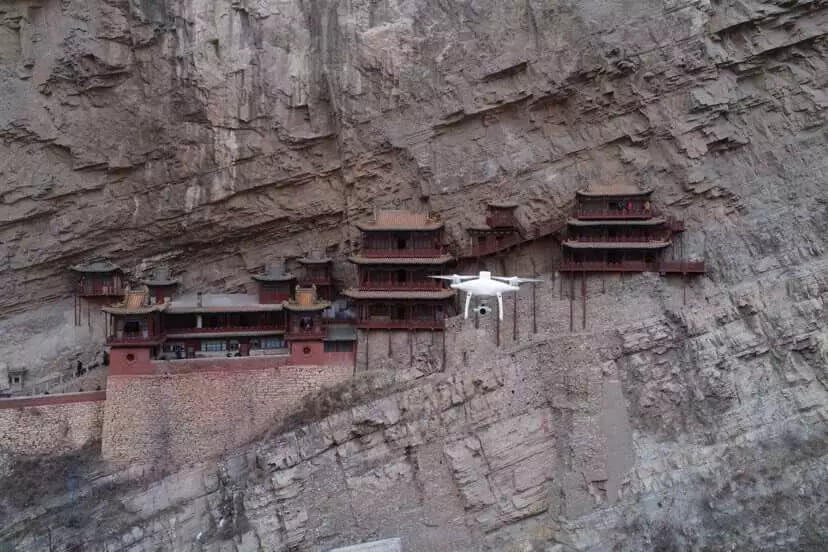
而對於可在空中自由懸停的多旋翼無人機而言,這些挑戰迎刃而解。本次採集數據使用的是精靈Phantom 4 RTK ,它的軸距僅有350毫米,重量1391克,可由單人攜帶並且可在狹窄的空間自由起飛。 懸空寺所在的金龍峽是一個南北通透的峽谷,精靈Phantom 4 RTK克服了穿堂風的阻礙成功起飛。在沒有地面控制點的情況下,精靈Phantom 4 RTK仍可通過RTK提供的精准定位信息和高精度成像系統實現高達3厘米的平面精度和5厘米的高程精度
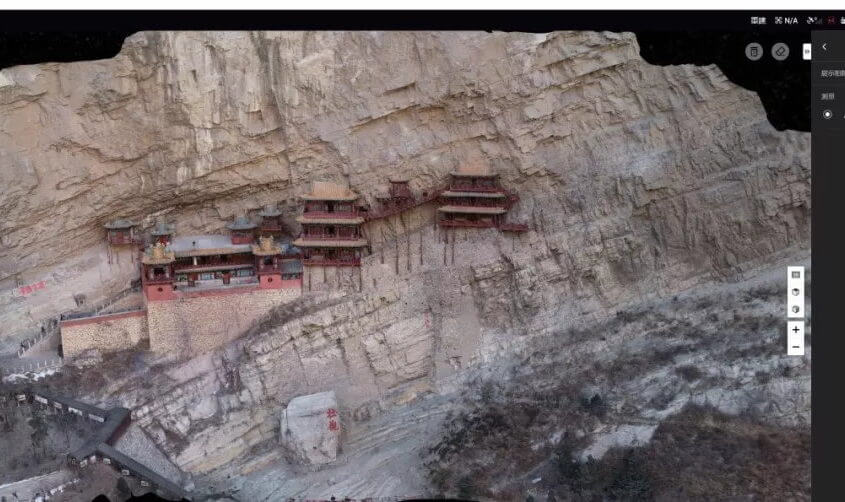
三維建模精準還原
整座寺廟呈“一院兩樓”般佈局,總長約32米,樓閣殿宇40間,構件變化繁多,建模工作量巨大。大疆智圖在6個小時內就完成了730張影像的高精度三維重建。整個建模過程全自動,無需人為再進行參數調整。

懸空寺佈局極為緊湊,六座殿閣相互交叉,棧道飛架,虛實相生,空間層次豐富。大疆智圖重建的高精度三維模型精準還原了建築內的錯落變化,大到滑坡,小至建築內的一根木頭斷裂,皆可清晰重現。
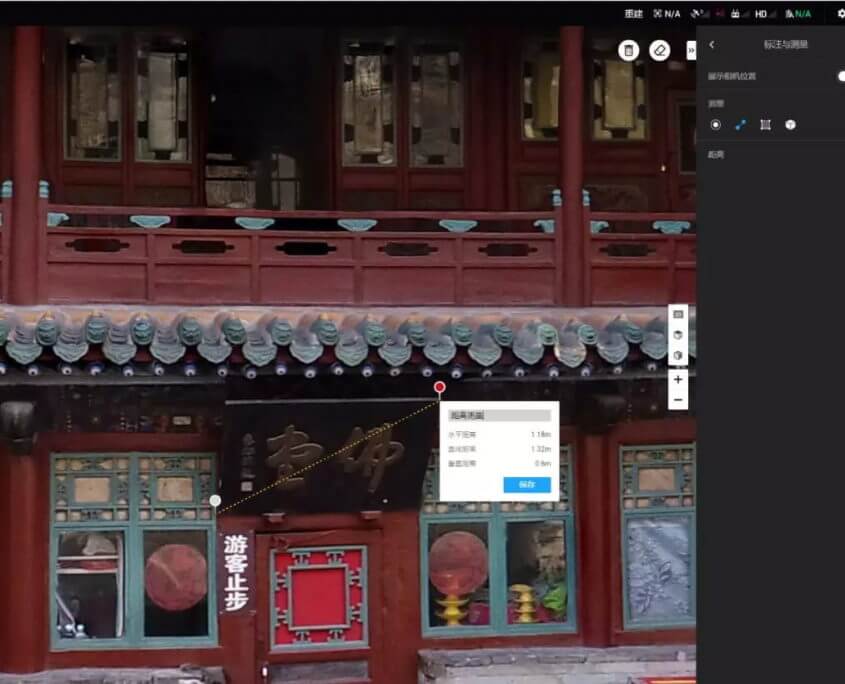
距離測量
工作人員在三維模型上點擊目標部位,可以輕鬆測量出對應的坐標、距離、面積和體積,將原本只能由人工定性描述的問題數據化。在模型上發現受破壞或腐蝕的部位,還可進行標註並導出,為針對性的修復提供依據。
相對於傳統航測,大疆精靈4 RTK 無人機大大降低了數據採集成本,並提供了高精度的影像位置信息,簡化了數據處理流程。另外,大疆智圖軟件的建模效果很驚艷,是一款優秀的三維實景建模軟件。軟硬件之間無縫銜接,形成了一套高效率、高精度的攝影測量解決方案。“
文物數位化已成趨勢
大疆精靈 Phantom 4 RTK 和大疆智圖組成的高精度、高效率、低成本、低門檻的航測解決方案,將大力推動文物古蹟的數位化進程,為保護文化遺產貢獻科技力量。
更多了解以及購買 DJI 大疆精靈 Phantom 4 RTK

造無人機的大疆,如何生產出口袋神器?
但大疆作為一家專業的無人機公司,為什麼能推出改變地面影像拍攝的設備?今天就等疆哥為大家講解一下,無人機與手持影像穩定器,兩者之間千絲萬縷的關係,就能知道大疆為什麼能推出地面的影像拍攝設備。
無人機與雲台
以往,攝影師都使用路軌或飛貓等重型設備,在拍攝視頻時進行增穩,雖然增穩效果不錯,但使用起來不太方便。後來,相機加入光學防抖和電子防抖技術進行增穩,使用起來雖然方便,但增穩效果一般。

無人機飛行時需要傾側機身,所以機身晃動明顯,更需要影像穩定係統協助。

大疆推出禪思Z15 雲台,解決了航拍視頻晃動的問題。
後來大眾通過無人機,認識到雲台能有效解決了航拍影像晃動的難題,並把雲台技術引入地面端,改良成手持穩定器,大眾才有一個方便使用、效果又好的影像增穩設備。
但是,為什麼原屬於空中的無人機,居然會改變了地面視頻拍攝的方式?這是因為無人機、雲台或是我們在地面上用的手持穩定器,都採用了類似的增穩技術,讓機器懂得“穩住”自己。
如何才能穩定住?

無人機會感知自己的位置,調整電機輸出,然後回到合適位置。*專業操作,請勿模仿
這是因為無人機傳感器(例如GPS 或視覺系統)能感知無人機偏離了正確位置,然後無人機就會按著偏離位置和正確位置的距離,調整動力輸出,把無人機回調到合適位置。

手持穩定器也會感知相機的角度,調整電機輸出,然後把相機回到合適角度。
同樣地,無人機的雲台相機、或是地面上的手持穩定也是一樣。當相機抖動時,穩定器裡的陀螺儀會感測相機角度與正確角度的差距,然後通過改變電機動力,糾正相機指向;這樣,相機拍攝角度才不會出現太大變化,讓畫面變得更穩。
把無人機或相機合理回調,看起來很簡單,但要讓無人機或手持穩定器適應多變的環境,卻不是易事。
無人機增穩算法
這時候,無人機雲台相機就更需要使用PID 控制器(Proportional–Integral–Derivative Controller) 來增強穩定性。PID 控器是目前主流的機器人控制算法,大疆舉辦的RoboMaster 機甲大師比賽、近年十分流行的自動駕駛汽車,也有用到以PID 控制器為基礎的算法。
通過PID 控制算法,無人機能在回調的同時,又能保持穩定。
首先,傳感器會先感知無人機或云台的位置變化,然後PID算出每次調整時出現的誤差數據,然後按客觀環境增加或減少調整的力度,避免系統頻繁大幅調整。無人機傳感器與PID控制算法配合,不但能讓無人機的回調位置更精準,也能避免機體頻繁晃動,增加飛行的穩定性。
手持穩定器也在類的PID 控制算法下保持穩定。
同樣地,無人機雲台相機或手持穩定器,也是通過這種方式穩定鏡頭角度。所以要穩住影像,並不是隨便買幾個傳感器就能解決,更需要通過深厚的算法積累,才能拍出來的畫面不會晃來晃去。
無人機穩定技術
無人機與手持穩定器,兩者有不少技術是互通的,所以無人機公司推出手持穩定器,不但不是跨界;相反,就是有了深厚的無人機技術積累,才能生產出如此小巧可靠的手持穩定器呢。